
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Ao encomendar o braço robótico para o seu projeto de moldagem por injeção, o braço será montado para receber as peças pelo lado do operador ou pelo lado oposto, de acordo com o seu projeto. No entanto, em alguns casos, será necessário inverter o lado de recebimento das peças da máquina de moldagem por injeção. Nessa situação, será preciso inverter a instalação do braço robótico. Neste capítulo, usaremos como exemplo um robô de injeção servo de 3 eixos com servomotor e driver Panasonic para demonstrar como realizar a instalação invertida dos braços robóticos.
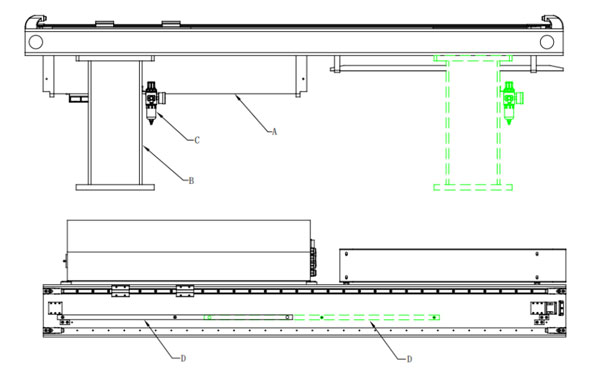
Base reversa
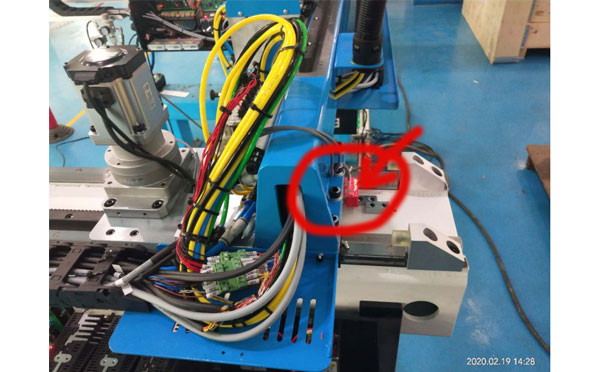
Sensor de marcha à ré 1
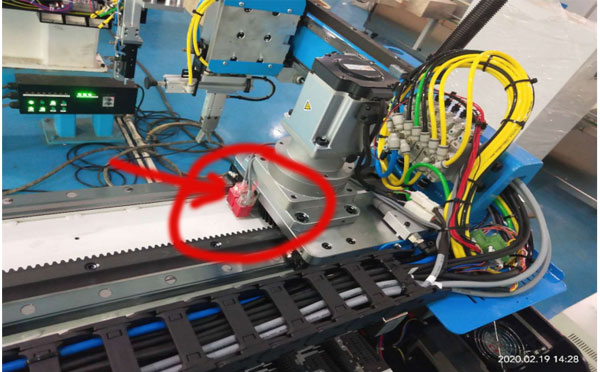
Sensor de marcha à ré 2
Descrição

Configuração de parâmetros do Panasonic A6
O processo de modificação:
Pressione a tecla "S" → em seguida, pressione a tecla "M" (uma vez), encontre Pr0.00 → pressione a tecla "S" (uma vez), se o parâmetro exibido for "1", modifique-o para "0"; se for "0", altere-o para "1" (pressione as teclas para cima/para baixo para modificar os parâmetros). Após concluir todas as configurações, pressione a tecla "S" por 2 segundos → pressione a tecla "M" (uma vez) → pressione a tecla "S" (uma vez) → pressione a tecla "UP" (mantenha pressionada por 7 segundos até que a tela exiba "-----") para salvar a configuração.
Repita o processo acima para definir os parâmetros de Pr0.12 e faça com que o robô desligue e reinicie novamente após a conclusão de todas as configurações de parâmetros. O robô será inicializado com a nova configuração.
AVISO: Para a segurança de suas instalações, realize qualquer modificação nos parâmetros seguindo as instruções de nossa equipe de atendimento online. Nosso engenheiro de serviço irá guiá-lo passo a passo durante todo o processo.
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







