
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
A entrada/saída (I/O) aqui se refere ao sinal de entrada/saída do braço robótico, permitindo que os operadores monitorem a comunicação entre o braço robótico e a máquina de moldagem por injeção. É uma referência para diagnosticar problemas no braço robótico, sejam eles causados por fiação incorreta ou programação errada. A página de I/O, juntamente com o histórico de alarmes, ajudará você a encontrar rapidamente uma solução para qualquer falha no braço robótico.
Clicar no item de menu "Monitor" na barra de menu principal abrirá a página do monitor, conforme mostrado abaixo:
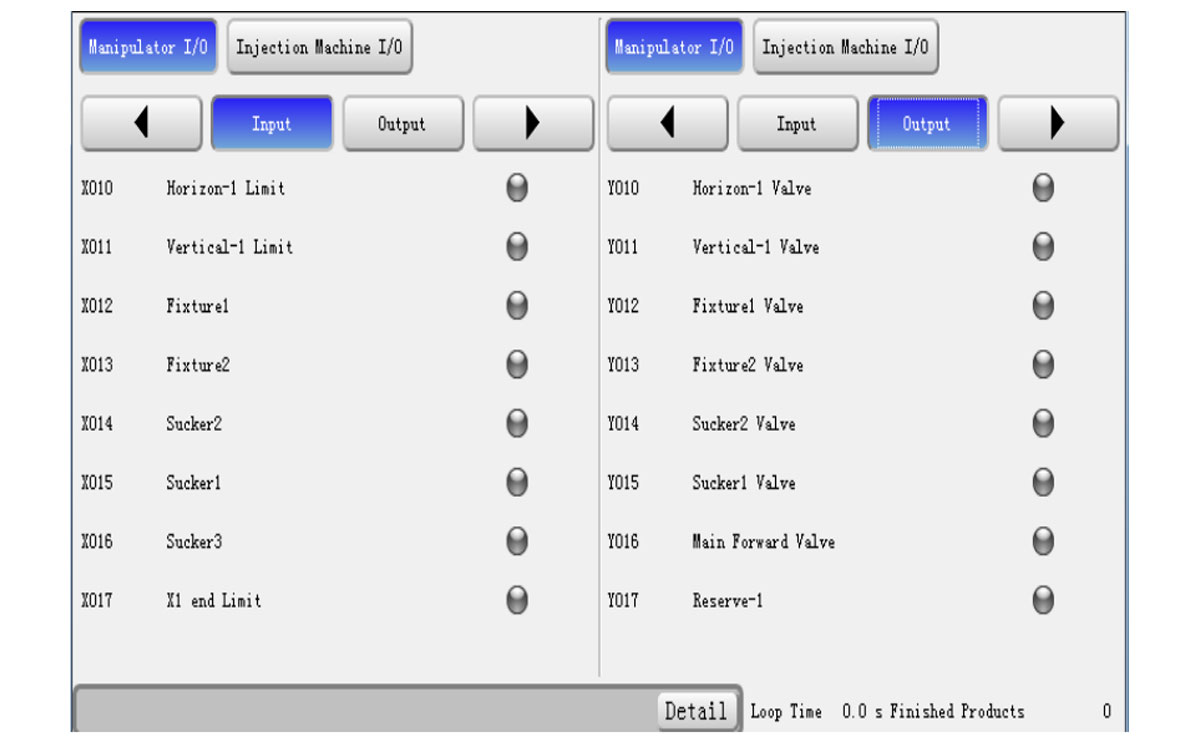
A janela é dividida em duas partes, com o lado esquerdo e o lado direito independentes. Você pode visualizar os sinais de entrada e saída simultaneamente. Clicar no botão E/S da Máquina de Injeção abrirá o monitor de sinais de E/S da máquina de moldagem por injeção.
Clicar na opção Alarme na barra de menu principal abrirá a página de histórico de alarmes, conforme mostrado abaixo:
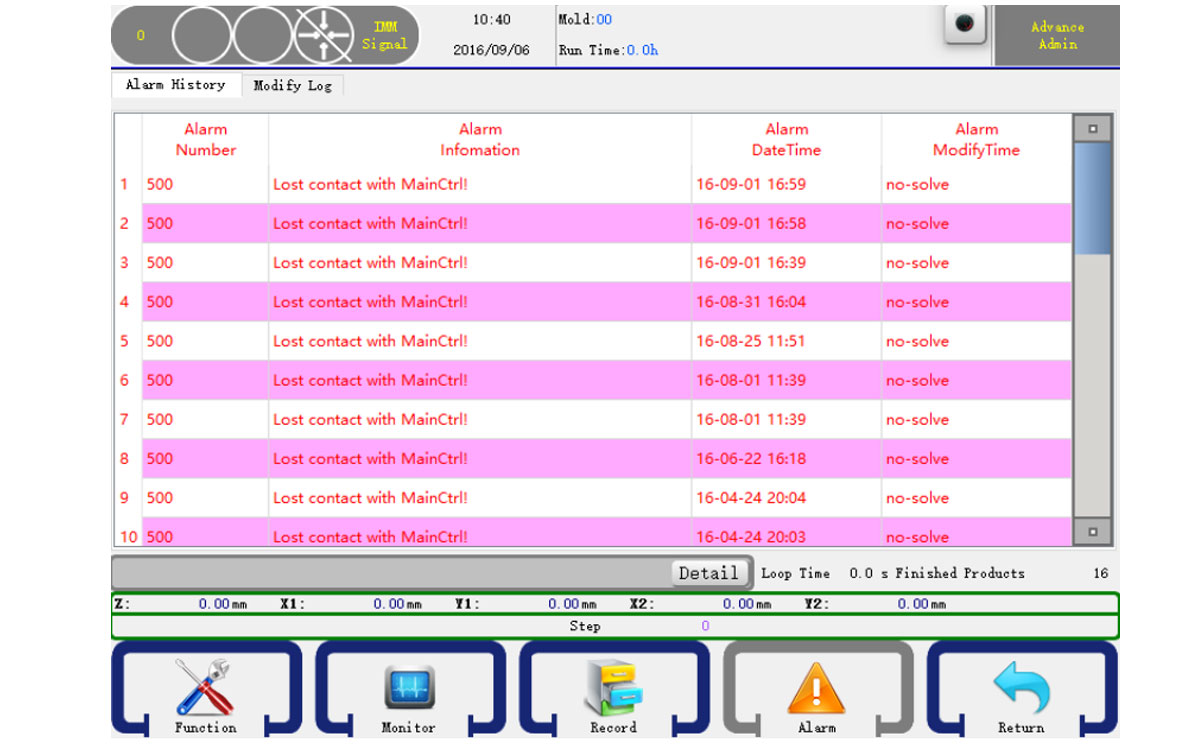
Os 50 registros de alarme mais recentes ainda serão exibidos nesta página.
Se a máquina tiver um alarme, clique no botão "detalhes".
| Código | Informações do alarme | Motivo do alarme |
|---|---|---|
| 1190 | O limite superior principal não está ativado quando a travessia é de saída para entrada. | O deslocamento do eixo Z ocorre de dentro da zona de segurança para fora da zona de segurança, com o limite superior do braço principal desativado. |
| 1192 | A posição atual é inferior à posição de segurança que exige autorização. | A posição atual é inferior à posição de segurança que exige autorização. |
| 1193 | A posição atual é maior do que a posição de segurança da licença. | A posição atual é maior do que a posição de segurança da licença. |
| 1200 | Erro no sinal de confirmação com o dispositivo 1 ligado. | Erro na verificação de sinal após a ativação do dispositivo 1 |
| 1201 | Erro no sinal de confirmação com o dispositivo 1 desligado. | Erro na verificação do sinal após o desligamento do dispositivo 1 |
| 1202 | Erro no sinal de confirmação com o dispositivo 2 ligado | Erro na verificação de sinal após a ativação do dispositivo 2 |
| 1203 | Erro no sinal de confirmação com o dispositivo 2 DESLIGADO | Erro na verificação do sinal após o desligamento do dispositivo 2 |
| 1204 | Erro no sinal de confirmação com o dispositivo 3 ligado | Erro na verificação de sinal após a ativação do dispositivo 3 |
| 1205 | Erro no sinal de confirmação com o dispositivo 3 desligado. | Erro na verificação de sinal após o desligamento do dispositivo 3 |
| 1206 | Erro no sinal de confirmação com o dispositivo 4 ligado | Erro na verificação de sinal após a ativação do dispositivo 4 |
| 1207 | Erro no sinal de confirmação com o dispositivo 4 desligado. | Erro na verificação de sinal após o desligamento do dispositivo 4 |
| 1208 | Erro no sinal de confirmação com Sucker1 LIGADO | Erro na verificação de sinal após a ativação do Sucker 1 |
| 1209 | Erro no sinal de confirmação com o Sucker 1 DESLIGADO | Erro na verificação de sinal após o desligamento do Sucker 1 |
| 1210 | Erro no sinal de confirmação com o Sucker 2 LIGADO | Erro na verificação de sinal após a ativação do Sucker 2 |
| 1211 | Erro no sinal de confirmação com o Sucker 2 DESLIGADO | Erro na verificação de sinal após o desligamento do Sucker 2 |
| 1306 | Por favor, verifique o ponto de espera do dispositivo 1. | O dispositivo 1 deve estar DESLIGADO quando em modo de espera. Por favor, verifique. |
| 1307 | Por favor, verifique o ponto de espera, Dispositivo 2. | O dispositivo 2 deve estar DESLIGADO quando em modo de espera. Por favor, verifique. |
| 1308 | Por favor, verifique o ponto de espera, Dispositivo 3. | O dispositivo 3 deve estar DESLIGADO quando em modo de espera. Por favor, verifique. |
| 1309 | Por favor, verifique o ponto de espera, Dispositivo 4. | O dispositivo 4 deve estar DESLIGADO quando em modo de espera. Por favor, verifique. |
| 1310 | Por favor, verifique o ponto de espera da ventosa 1. | A ventosa 1 deve estar DESLIGADA quando em modo de espera. Por favor, verifique. |
| 1311 | Por favor, verifique o ponto de espera Sucker 2. | O Sucker 2 deve estar DESLIGADO quando em modo de espera. Por favor, verifique. |
| 1400 | O eixo Y não detecta limite durante a subida. | O braço principal não está na posição elevada no modo automático; você deve posicioná-lo manualmente na posição inicial. |
| 1403 | O eixo Y2 não detecta limite durante a subida. | O braço auxiliar não está na posição para cima no modo automático; você deve colocá-lo na posição original manualmente. |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







