
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Para que os braços robóticos funcionem, é necessária a cooperação entre o sistema de controle e a estrutura mecânica, sendo a placa eletrônica o meio de comunicação entre o sistema de controle e a estrutura mecânica dos braços robóticos. Neste capítulo, discutiremos a definição das portas das placas instaladas em um braço robótico.
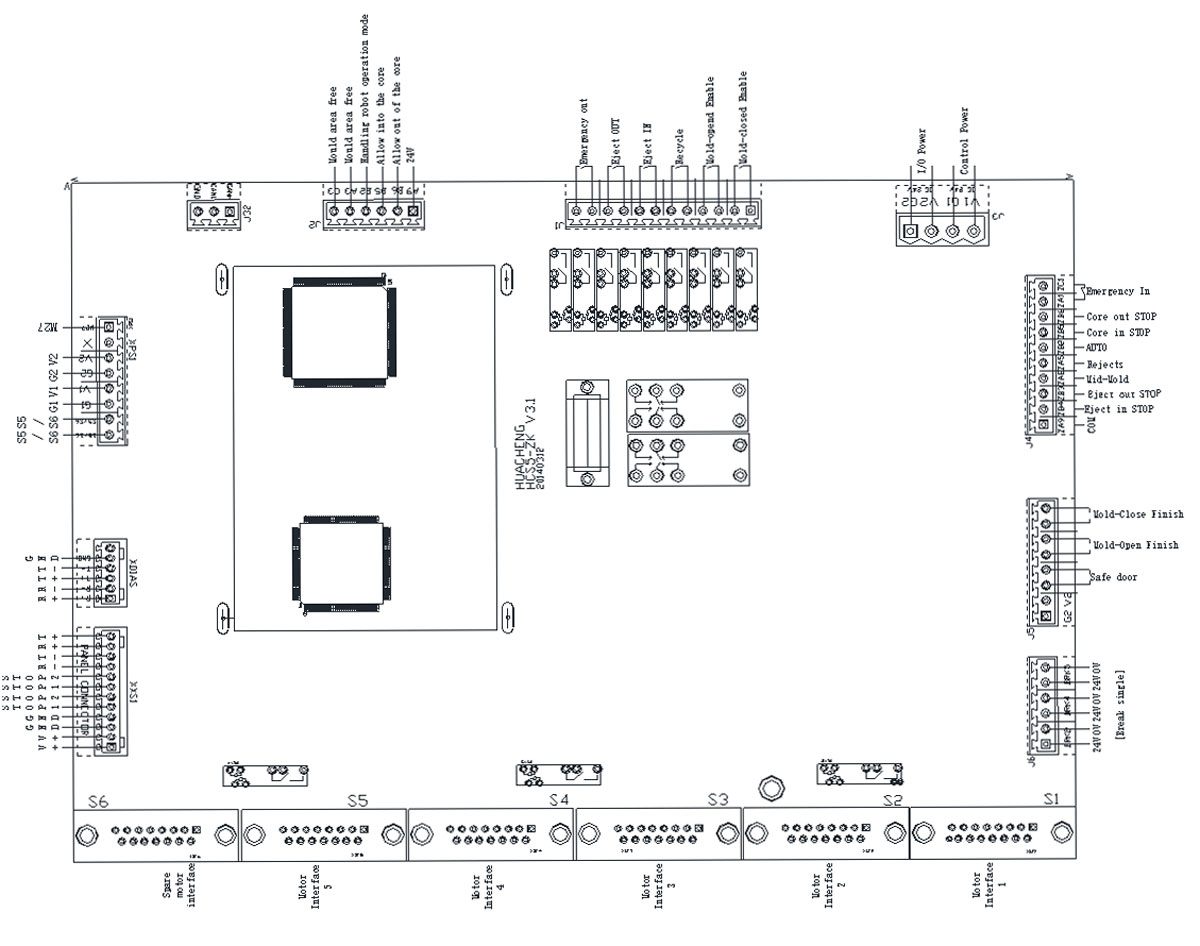
O desenho acima mostra a definição das portas da placa principal dos braços robóticos de injeção servo de 5 eixos da SWITEK.
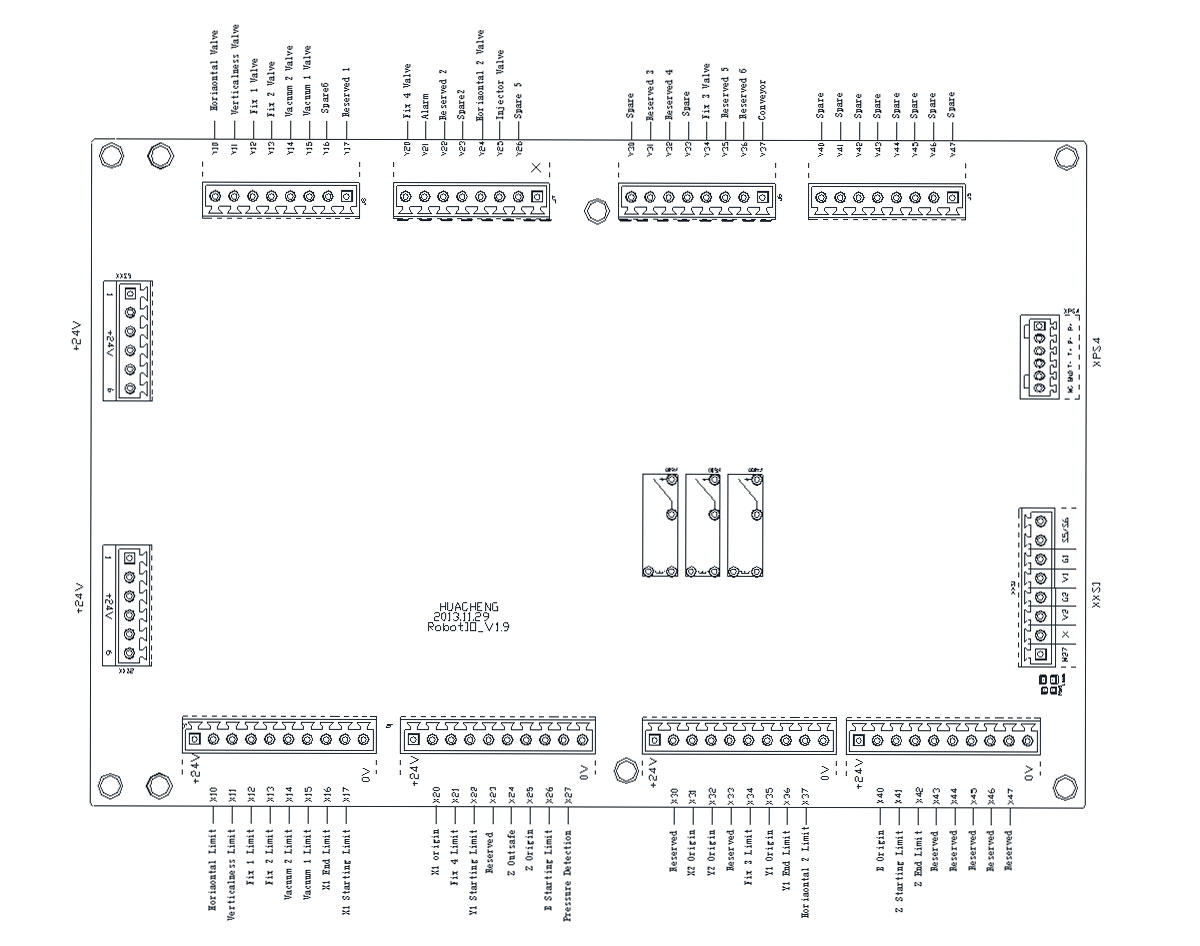
O desenho acima mostra a definição das portas da placa de E/S dos braços robóticos de injeção servo de 5 eixos da SWITEK.
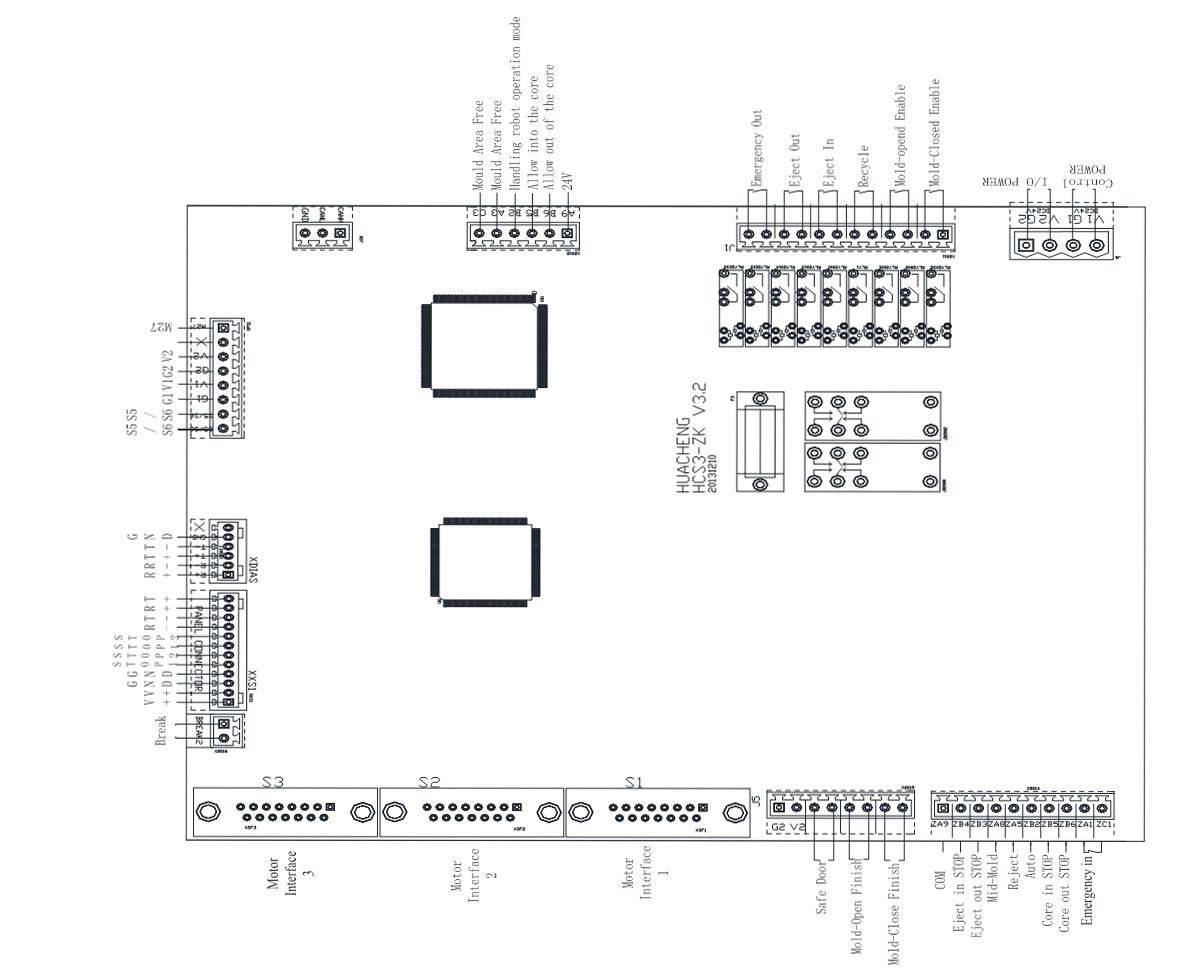
O desenho acima mostra a definição das portas da placa principal dos braços robóticos de injeção servo de 3 eixos da SWITEK.
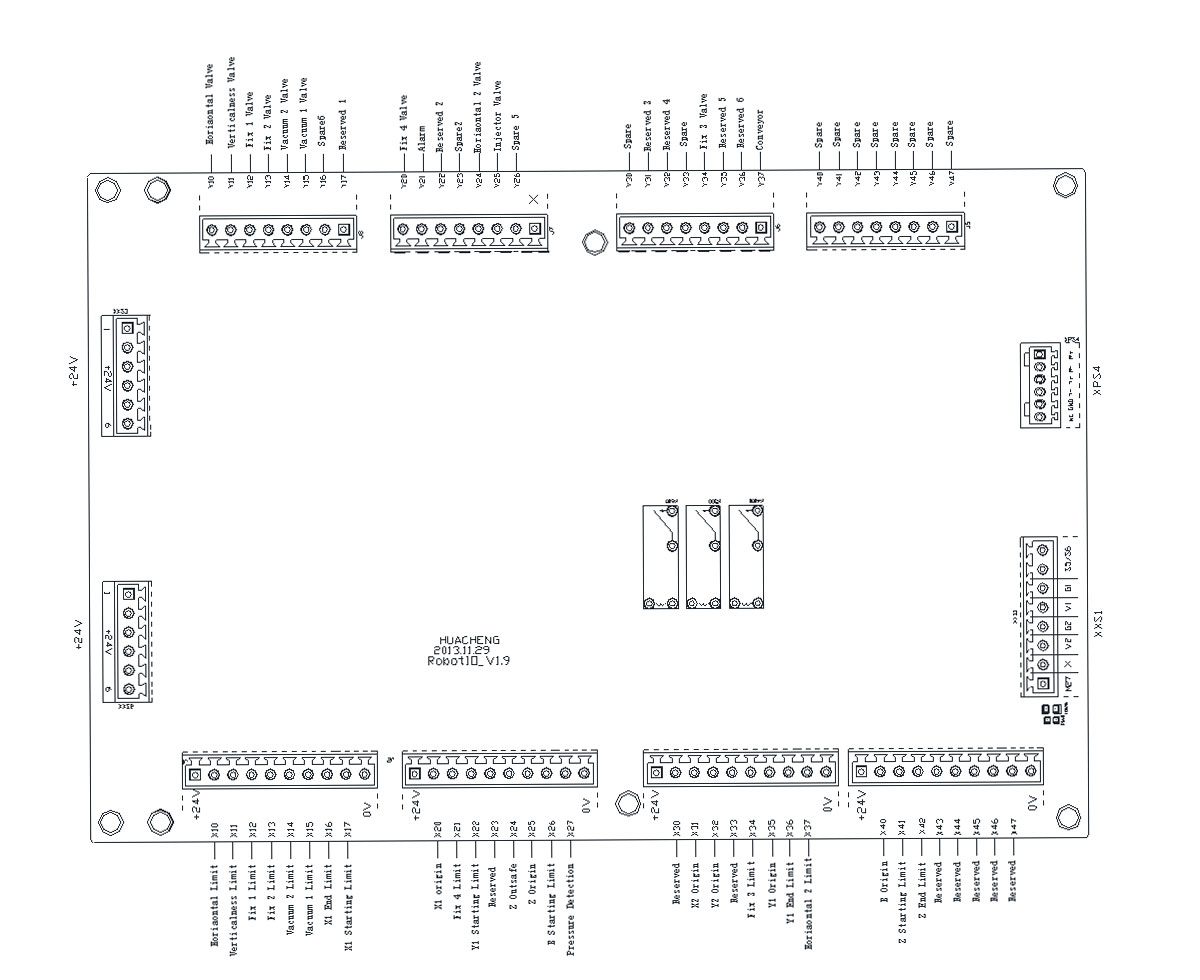
O desenho acima mostra a definição das portas da placa de E/S dos braços robóticos de injeção servo de 3 eixos da SWITEK.
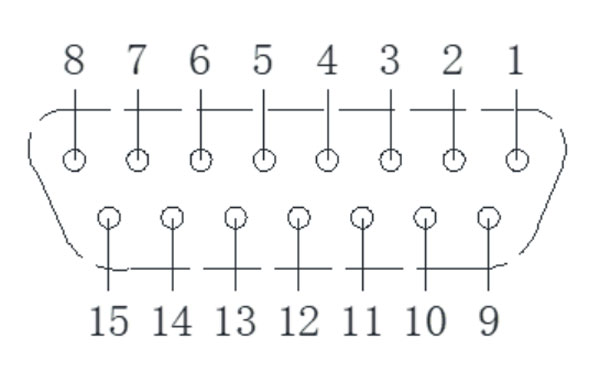
| Nº do pino | Definição de terminal | Nº do pino | Definição de terminal |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







