
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
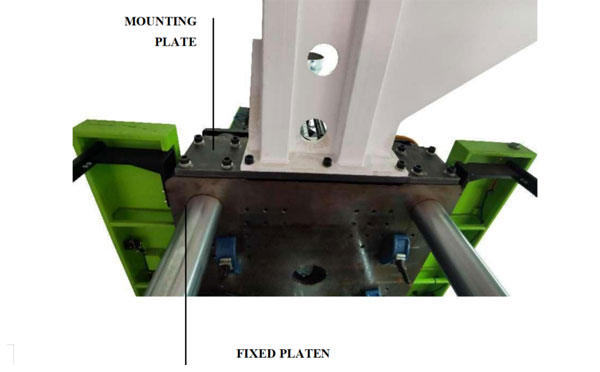
Os braços robóticos para as máquinas de moldagem por injeção serão instalados na parte superior da máquina de moldagem por injeção. O instalador do braço robótico deve manter as INSTRUÇÕES DE SEGURANÇA em mente durante todo o processo de instalação. Aqui neste capítulo, você encontrará um guia detalhado de como fixar o braço robótico à máquina de moldagem por injeção com segurança, passo a passo.
Primeiro, verifique se a placa de base do robô ou a placa de transferência são compatíveis com a placa de montagem da máquina de moldagem por injeção?
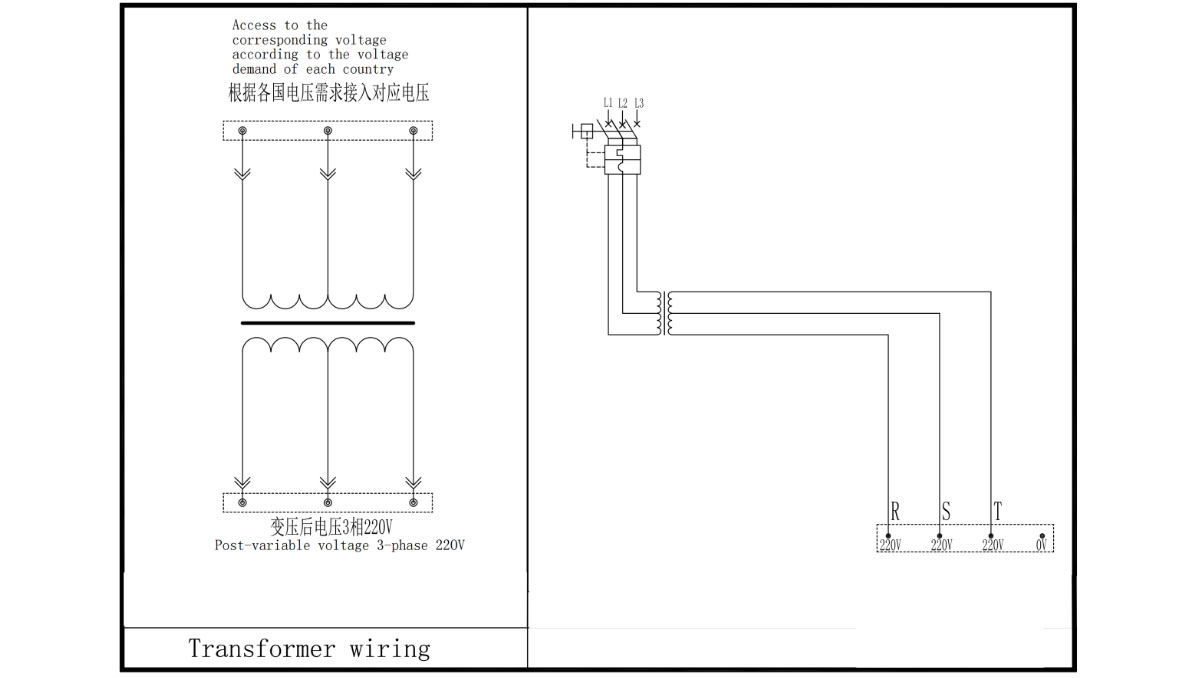
Conexão da fonte de alimentação -- Fiação de alimentação por meio de um transformador
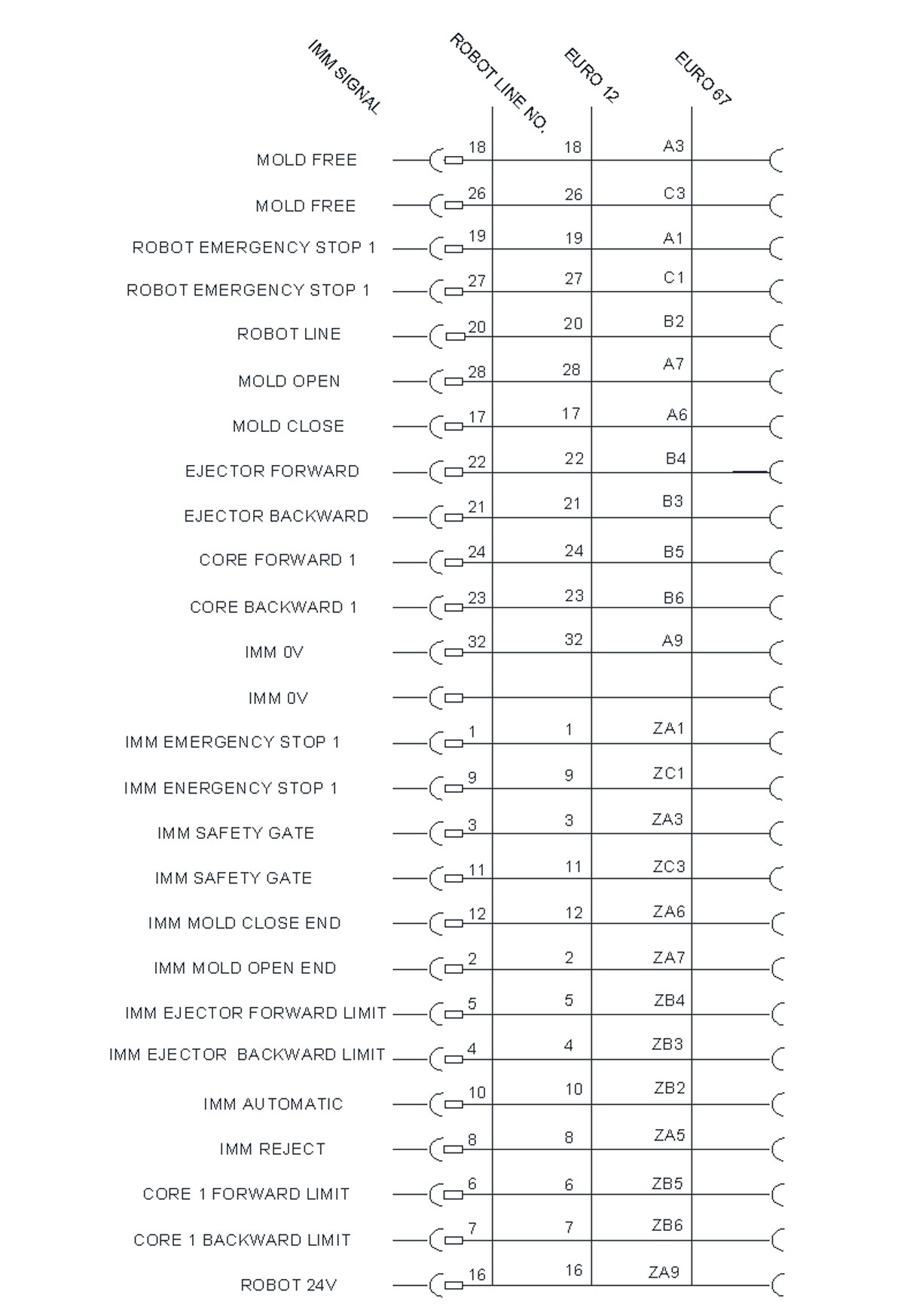
Comunicação com a máquina de moldagem por injeção -- EU12/EU67/JIS
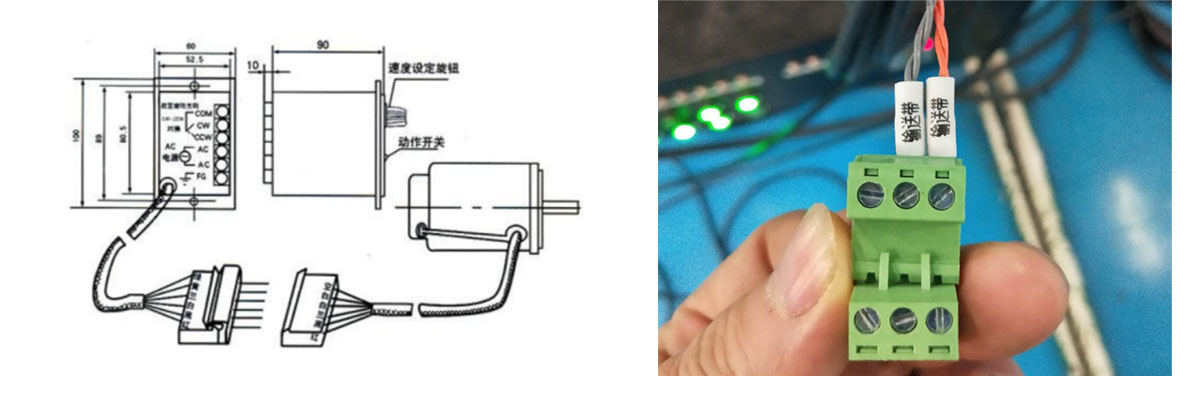
Os pontos COM e CW/CCW dentro da caixa de controle da correia transportadora são conectados à sua junta no robô.
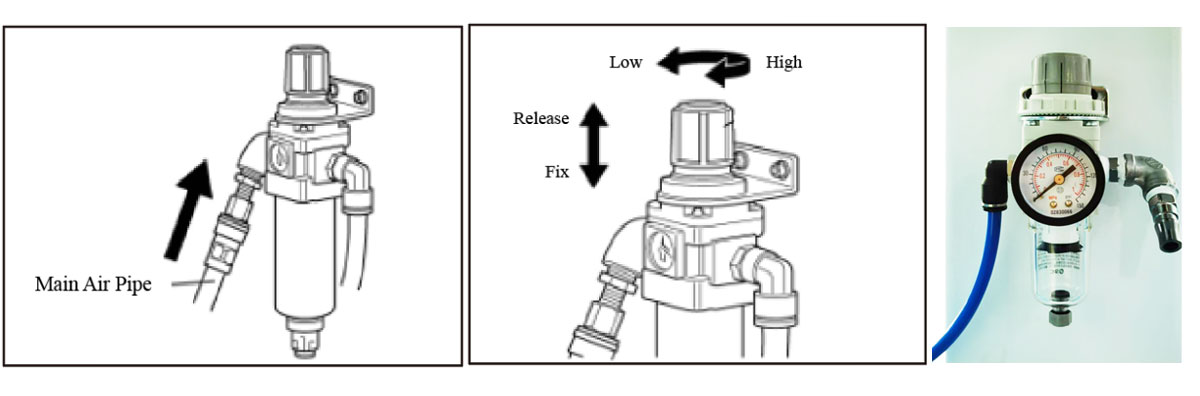
Conecte o tubo de ar principal preparado à "ENTRADA" da válvula redutora de pressão do filtro de ar
NOTA: a pressão dos dois manômetros não deve ser inferior a 0,5 MPa e a fonte de ar deve ser mantida seca
Todos os canos e tubos de ar devem ser regulados e fixados com fita adesiva e mantidos longe de áreas quentes e de alta temperatura.

ÁREA 2: Para a máquina de moldagem por injeção e o manipulador se conectarem e trocarem sinal na área visual.
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right








