
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
A tela do painel de controle é a interface do robô IML, por meio da qual o operador irá operar e programar o robô. Neste capítulo, apresentaremos como programar e configurar os parâmetros do robô IML. Abaixo, a interface do robô IML após ser ligado e o sistema ser carregado para sua referência:

Gire o botão no canto superior esquerdo do aparelho para a posição MANU e a interface será a seguinte:
(1)Axis operation
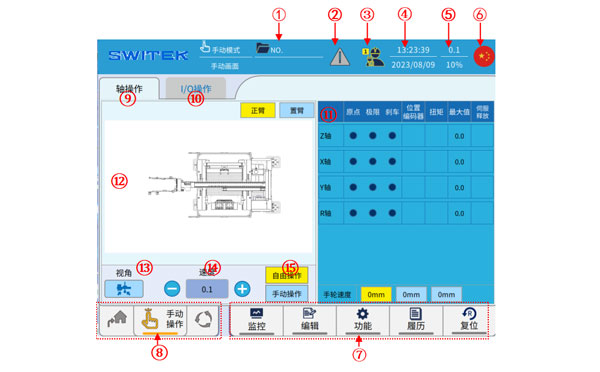
Lista das funções de cada botão na tela:
| Não | Nome | Função |
|---|---|---|
| (1) | Nome do perfil atual | Clique no nome do arquivo em uso para acessar a página de gerenciamento de arquivos e realizar as funções de upload, download, leitura, salvamento, sobrescrita, comparação e exclusão do arquivo. |
| (2) | Exibição de alarme | Se o alarme estiver ativo, o ícone será vermelho; clique para visualizar os detalhes do alarme. |
| (3) | Nível do usuário | O nível de usuário atual é exibido. Clique para alternar entre os usuários 1/2/3/4 (Operador/técnico/gerente/nível mais alto) e altere a senha de cada usuário. |
| (4) | Hora do sistema | Exibe a data e a hora atuais. Clique para modificar as configurações. |
| (5) | Indicador de velocidade | Exibição da velocidade manual/automática atual. Clique para modificar a velocidade. |
| (6) | Exibição do idioma | O sistema atual exibe um ícone de idioma. Clique para alternar o idioma de exibição da tela. |
| (7) | Botões de fita | Para outras entradas de função, clique em "Exibir" para modificar. |
| (8) | Exibição do modo de execução | O modo de operação atual (Original/manual/automático) pode ser alternado através do botão no canto superior esquerdo do painel de controle. |
| (9) | Operação do eixo | Entre na página de operação de eixo padrão do sistema e você poderá alternar para a página de exibição de eixo (14) de operação de E/S (13). |
| (10) | Operação de E/S | Clique para entrar na interface de operação de E/S, que pode exibir o status LIGADO/DESLIGADO da entrada em tempo real e o LIGADO/DESLIGADO de cada ponto de saída. |
| (11) | Representação de eixos | Na interface de exibição do eixo, ao usar o botão direito para operar o eixo, você pode observar o status em tempo real da origem, limite, freio, posição atual, torque do eixo e velocidade. |
| (12) | Botões de operação do eixo | Switch with the main and jib of (8) and (9) and click to move each axis. |
| (13) | Mudança de perspectiva | Quando o eixo é operado através de (15), o ângulo de visão é alterado, e é conveniente comparar com a máquina real. |
| (14) | Comutação de velocidade | Clique para alternar a velocidade de funcionamento manual, que é dividida em cinco velocidades: 0,1/1,0/baixa/média/alta. Observe que você não pode usar a escala 0,1/1,0 para mover o eixo sem retornar ao ponto original. |
| (15) | Operação manual e gratuita | Operação livre: O movimento de cada eixo pode ser controlado individualmente pressionando os botões. Operação manual: controle cada eixo para mover para um ponto fixo pressionando um botão. |
(2) Operação de E/S
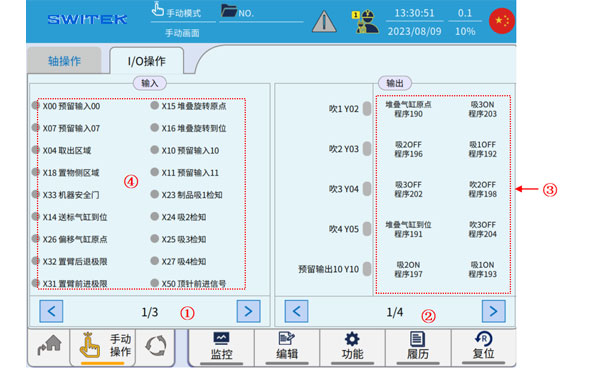
Lista de cada função de anotação na tela:
| Não. | Nome | Função |
|---|---|---|
| (1) | Troca de páginas | Alternando entre as páginas do visor de entrada. |
| (2) | Troca de páginas | Alternar entre páginas usando o botão Saída. |
| (3) | Botão de saída | Pressione e mantenha pressionado o interruptor de segurança na parte traseira do painel de programação e, em seguida, clique em cada botão para ligar/desligar a saída. |
| (4) | Exibição de entrada | Exibição ON/OFF dos sinais de entrada. |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







