
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
Após clicar no botão Zona, entramos na página de configuração do eixo, onde o operador definirá a zona de trabalho do eixo do robô IML. Aqui você encontrará duas páginas: na página de configuração da área, você pode definir os parâmetros da zona de trabalho do eixo do robô IML, e na página de correção da área, para o operador modificar os parâmetros do eixo do robô IML.
Configuração da área

| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de pontos | Selecione o valor extremo da área que deseja definir. |
| (2) | Memória de posição atual | Clique para memorizar a posição atual do eixo para o valor de configuração (3). |
| (3) | Definir valor | Clique para modificar a configuração. |
| (4) | Posição | A posição atual do eixo é exibida. |
Correção de aeração
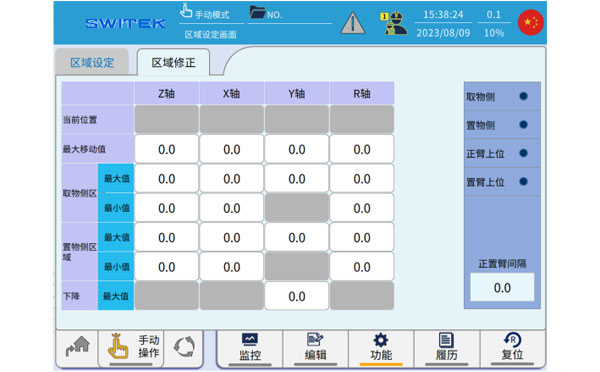
Os parâmetros definidos em "Configurações de Área" podem ser visualizados e modificados em "Correção de Área".
Os parâmetros da área definida devem ser consistentes com o sinal do sensor, etc., e o manipulador será alarmado se descer para fora da área definida ou se houver uma tendência de sair da área definida no estado descendente do braço.
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







