
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave: Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
O "Monitor" que estamos discutindo aqui é onde você terá uma compreensão clara da situação de funcionamento do braço robótico. Na página do monitor, você pode verificar o sinal do braço robótico, do EOAT, da máquina de moldagem por injeção e o status de funcionamento do servomotor e do sistema de controle do robô IML para um diagnóstico rápido do ponto de falha do sistema.
Clique no ícone  , a seguinte página será exibida: A página de monitoramento:
, a seguinte página será exibida: A página de monitoramento:

| Não | Nome | Função |
|---|---|---|
| (1) | Robô/Gabarito/IMM | O IO exibe a categoria; clique para alternar rapidamente para a página do sinal correspondente. |
| (2) | Página | Clique para mudar para a página de E/S. |
| (3) | display de E/S | Exibição em tempo real de todos os pontos de entrada e saída (ligado/desligado). |
| (4) | Monitoramento de direção | Exibição em tempo real da velocidade, torque, taxa de carga e desvio de cada servomotor do eixo. |
| (5) | Monitoramento interno | Exibição em tempo real do status de E/S interna. |
Use (1) ou (2) para alternar o visor de E/S, e a luz frontal acende para indicar que o sinal está ativo.
3.5.2 Monitoramento de unidades
Valores em tempo real
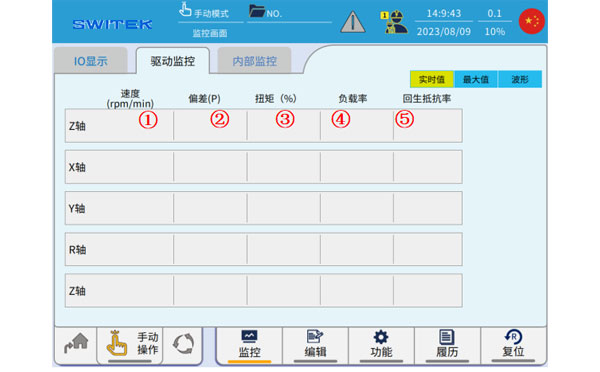
| Não | Nome | Função |
|---|---|---|
| (1) | Velocidade (rpm/min) | Exibição em tempo real da velocidade de funcionamento de cada eixo. |
| (2) | Desvio (P) | Exibição em tempo real dos desvios em cada eixo.. |
| (3) | Torque (%) | Exibição percentual em tempo real do torque para cada eixo. O torque instantâneo do servomotor pode atingir até 300% do torque nominal. |
| (4) | Fator de carga | Exibição em tempo real do fator de carga operacional de cada eixo. (100% máx.) |
| (5) | Taxa de resistência à resiliência | Exibição em tempo real da taxa de carregamento da resistência ao reaparecimento. |
Máximo

| Não | Nome | Função |
|---|---|---|
| (1) | Velocidade máxima para frente | Registro da velocidade máxima de cada eixo em seu movimento na direção positiva. |
| (2) | Velocidade máxima negativa | Registro da velocidade máxima de cada eixo movendo-se em direção negativa. |
| (3) | desvio máximo positivo | Registra o desvio máximo de cada eixo na direção positiva. |
| (4) | desvio máximo negativo | Registro do desvio máximo de cada eixo na direção negativa. |
| (5) | torque máximo para frente | Registro do torque máximo de cada eixo enquanto ele se move na direção positiva. |
| (6) | torque máximo negativo | Registro do torque máximo de cada eixo quando este se move na direção negativa. |
| (7) | Reiniciar | O valor máximo previamente registrado é zerado. |
forma de onda
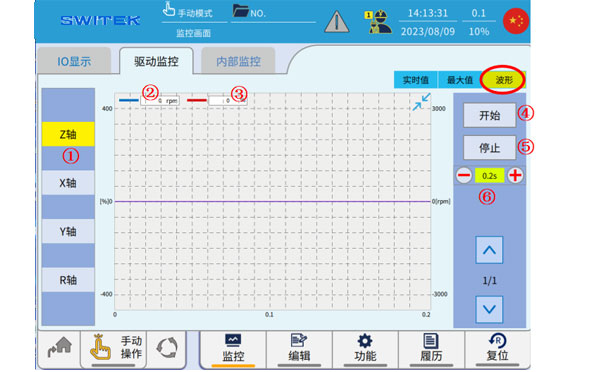
| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de eixos | Clique para selecionar o eixo a ser exibido. |
| (2) | Torque (%) | A curva da forma de onda azul mostra a mudança no torque. O torque instantâneo do servomotor pode atingir até 300% do torque nominal. |
| (3) | Velocidade (rpm/min) | A curva vermelha em forma de onda mostra a variação na velocidade. |
| (4) | Começar | Após selecionar o eixo (1), clique em "Iniciar" para iniciar a amostragem da forma de onda. |
| (5) | Parar | Interrompa a amostragem da forma de onda. |
| (6) | A forma de onda exibe a escala. | Clique em "+" e "-" para aumentar e diminuir o zoom da forma de onda exibida. |
3.5.3 Monitor interno
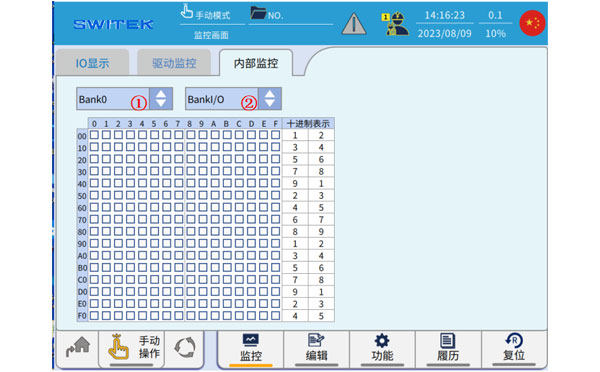
"Monitoramento interno" refere-se ao monitoramento do LIGADO/DESLIGADO da posição do indicador interno do controlador, que é dividido em 5 unidades em branco *2 , um total de 10 áreas, e a troca entre banco e unidade é concluída através de (1) e (2).
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







