
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
Sempre que você reiniciar o robô IML, é muito importante que o eixo do braço robótico retorne à posição de origem. Neste capítulo, você aprenderá como realizar a "ORG" do robô IML antes da execução automática.
Gire o botão no canto superior esquerdo do painel de controle para ORI e a interface exibirá a tela de origem:
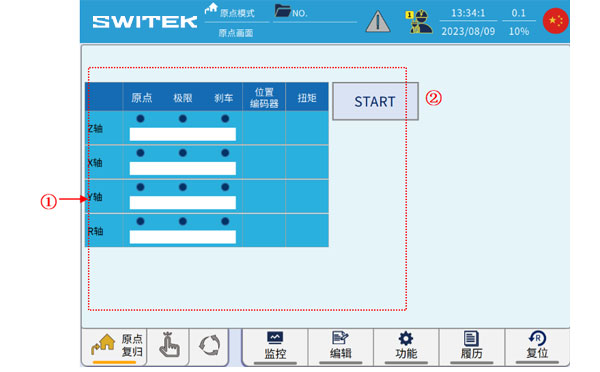
| Não | Nome | Função |
|---|---|---|
| (1) | Dados do eixo |
|
| (2) | tecla INICIAR | Clique para iniciar a ação automática de retorno à origem. |
No modo ORG original, pressione o botão INICIAR para iniciar a redefinição de origem.
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







