
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
A configuração dos parâmetros mecânicos do robô IML inclui a seleção do módulo da unidade funcional, o parâmetro mecânico do eixo, o servomotor etc. para garantir que o robô IML esteja funcionando com segurança e eficiência.
Seleção de Modelo

| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de modelo | Clique aqui para selecionar o nome do modo aplicável. |
| (2) | Salvar | Após selecionar (1) o modelo, clique em "Salvar" para confirmar a operação. |
| (3) | As informações do modelo selecionado são exibidas. | Esta seção de informações é exibida para os modelos para ajudá-lo a distingui-los. (Esta parte das informações do modelo precisa ser mantida durante a produção para garantir a precisão.) |
Observe que a operação acima, seleção de modelo - salvar, após a conclusão do conteúdo do modelo, não entra em vigor imediatamente, é necessário inicializar os parâmetros mecânicos, salvar os parâmetros do servo e, em seguida, reiniciar o sistema para que as alterações entrem em vigor.
Parâmetros mecânicos

| Não. | Nome | Função |
|---|---|---|
| (1) | Inicializar | Clicar nele lerá os dados iniciais dos parâmetros mecânicos no arquivo do modelo e os exibirá no visor em (4). |
| (2) | Salvar | Salvar alterações existentes |
| (3) | Página | Os parâmetros podem ser visualizados rolando a tela para cima e para baixo. |
| (4) | Conteúdo dos parâmetros mecânicos |
|
Observe que a modificação dos parâmetros acima não entra em vigor imediatamente, mas precisa ser salva e só terá efeito após a reinicialização do sistema.
Parâmetros de acionamento

| Não. | Nome | Função |
|---|---|---|
| (1) | Inicializar | Clicar nele lerá os dados iniciais dos parâmetros de acionamento no arquivo do modelo e os exibirá no visor em (4). |
| (2) | Salvar | Salvar alterações existentes. |
| (3) | Página | Os parâmetros podem ser visualizados rolando a tela para cima e para baixo. |
| (4) | Conteúdo do parâmetro de acionamento | Cada parâmetro do driver é editado e exibido. |
Instruções para configurar alguns parâmetros da unidade:
| Não. | Nome | Efeito | Valor inicial | Faixa | Unidade | O ponto principal do cenário | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Seleção do sistema INC/ABS | Reinício | 0 | 0~1 | "0" representa um motor incremental, "1" representa um motor absoluto. | ||
| PA1-04 | Sentido de rotação | Reboot | 0 | 0~1 | Ajuste quando o motor girar na direção errada. | ||
| PA1-13 | Modo de ajuste | Em tempo real | 0 | 0~2 | 0 é automático, 1 semiautomático e 2 manual. O robô é configurado para 1 quando é enviado. | ||
| PA1-14 | Relação carga/torque | Em tempo real | 23.0 | 0.0~300 | Tempos | ||
| PA1-15 | Ganho de ajuste | Em tempo real | 7 | 1~40 | |||
| PA1-27 | Valor limite de torque de avanço | Em tempo real | 300 | 0~500 | |||
| PA1-28 | Valor limite de torque negativo | Em tempo real | 300 | 0~500 | |||
| PA1-52 | Configuração S acc/dcc | Em tempo real | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Um número fixo de respostas de comando de posição | Em tempo real | 30.0 | 0.00~250.00 | |||
| PA1-55 | Posição do anel de ganho 1 | Em tempo real | 17 | 1~2000 | |||
| PA1-56 | Anel de Velocidade Ganho 1 | Em tempo real | 5 | 1~2000 | |||
| PA1-58 | Ganho de feedback 1 | Em tempo real | 0.000 | 0.000~1.500 | |||
| PA1-59 | Filtragem de torque | Reinício | 0.00 | 0.00~20.00 | |||
| PA1-70 | Modo de filtro Notch | Em tempo real | 1 | 0~1 | Quando 0, a detecção automática 1 é válida para o valor definido. | ||
| PA1-71 | Número de frequência do entalhe 1 | Em tempo real | 134 | 10~4000 | |||
| PA1-72 | Atenuação do entalhe 1 | Em tempo real | 1 | 0~40 | |||
| PA1-73 | Largura do entalhe 1 | Em tempo real | 2 | 0~3 | |||
| PA1-74 | Número de frequência do entalhe 2 | Em tempo real | 53 | 10~4000 | |||
| PA1-75 | Atenuação do entalhe 2 | Em tempo real | 1 | 0~40 | |||
| PA1-76 | Largura do entalhe 2 | Em tempo real | 2 | 0~3 | |||
| PA1-78 | A frequência número 0 da antiresonância de frenagem | Em tempo real | 7.0 | 1~300.0 | Hz | A supressão de vibração é eficaz durante a parada, sendo necessário medir a vibração real antes da configuração. | |
| PA1-79 | relação de inércia de vibração do freio | Em tempo real | 0 | 0~80 | Se estiver definido como 0, o PA1-78 será inválido e, se estiver definido como 1, o PA1-78 será válido. | ||
| PA1-80 | A frequência número 1 da antiresonância de frenagem | Em tempo real | 8.0 | 1~300.0 | Hz | A supressão de vibração é eficaz durante a parada, sendo necessário medir a vibração real antes da configuração. | |
| PA1-81 | relação de inércia de vibração do freio | Em tempo real | 0 | 0~80 | Se estiver definido como 0, PA1-80 é inválido e, quando definido como 1, PA1-80 é válido. | ||
| PA1-94 | Modo de filtro de torque | Reinício | 0 | 0~1 | Defina como 0 e não use filtragem de torque. | ||
| PA2-64 | Tempo de ação Brakek | Em tempo real | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Seleção de resistência retrógrada | Reinício | 1 | 0~1 | Defina como 1 quando o resistor de regeneração estiver conectado e como 0 quando não estiver conectado. | ||
| PA2-69 | Desvio em relação ao valor detectado | Em tempo real | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Configuração do valor de impedância retrógrada | Em tempo real | 30.0 | 3.9~160.0 | Ω | O valor da resistência regenerativa é definido. | |
| PA3-80 | Configuração de potência de impedância de reaparecimento | Em tempo real | 40 | 1~5000 | W | Configuração retroativa da capacidade de resistência | |
Modo de configuração e ajuste fácil

| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de eixos | Clique para selecionar o eixo em que deseja trabalhar. |
| (2) | Auto-tune | Quando a máquina é ajustada antes de sair da fábrica, os parâmetros de acionamento podem ser deduzidos neste modo. |
| Sintonização semiautomática | Modo de ajuste semiautomático, onde alguns parâmetros são fixos e outros podem ser ajustados com precisão. | |
| Ajuste manual | Todos os parâmetros de acionamento são fixos. | |
| (3) | Definir valor | A relação ganho-inércia-torque ajustada atualmente em uso. |
| (4) | Valor calculado | O valor derivado do cálculo atual. |
| (5) |  | Aplique o conteúdo do valor calculado ao valor definido. |
| (6) |  | Aplique o conteúdo do campo "Definir valor" ao campo "Valor calculado". |
| (7) | Salvar | Modifique e salve os parâmetros atuais do driver. |
Quando automático, você pode alternar o modo de ajuste de cada eixo nesta interface, modificar a relação inércia-torque e o ganho de ajuste, de modo a observar o efeito de operação dos valores definidos em tempo real e encontrar configurações de parâmetros mais adequadas.
Quando configurado para o modo de autoajuste, o parâmetro PA1-14, relação torque-inércia, é medido em tempo real.
A principal função do modo de ajuste automático é ajustar automaticamente o valor de acordo com o efeito de funcionamento quando os parâmetros de condução apropriados não são conhecidos no estágio inicial de depuração, até que o efeito de funcionamento seja bom e estável, e o valor da relação inércia-torque tenda a ser constante.
Quando o funcionamento estiver estável, mude para o modo de ajuste semiautomático, defina os parâmetros manualmente, salve-os, desligue a alimentação e ligue-a novamente antes que os parâmetros entrem em vigor. No modo de ajuste semiautomático, os parâmetros principais, como a "relação de torque de inércia", serão fixos, e alguns parâmetros do servo ainda serão ajustados em tempo real para garantir uma operação suave.
Quando configurado para o "Modo de Ajuste Manual", todos os parâmetros do servo são fixos. Este modo exige um alto grau de precisão na configuração dos parâmetros.
Configuração fácil - Ajuste do filtro Notch

| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de eixos | Clique para selecionar o eixo em que deseja trabalhar. |
| (2) | Filtragem adaptativa | Função de filtragem adaptativa comutação LIGADO/DESLIGADO. |
| (3) | Parâmetros relacionados à filtragem Notch | Diversos parâmetros relacionados à função de filtragem de entalhe. |
Se houver um som agudo no servo ligado no momento ou durante a operação, o filtro adaptativo pode ser ativado, o que eliminará automaticamente o som anormal causado pela ressonância mecânica e pode eliminar dois pontos de ressonância. Quando a frequência de ressonância é definida para 4000, não há ponto de ressonância.
Configuração fácil - Ajuste do controle de vibração
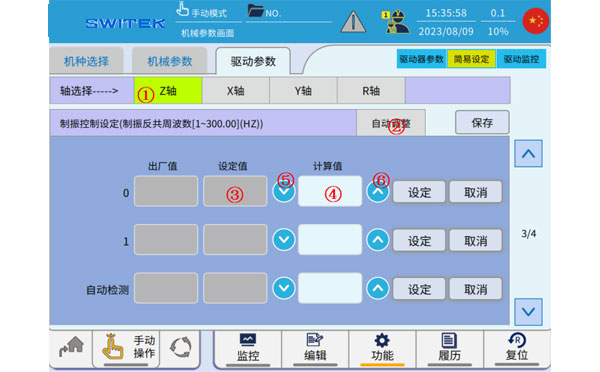
| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de eixos | Selecione o eixo que deseja operar. |
| (2) | Ajuste automático | Os parâmetros relevantes do controle de vibração configurado são detectados automaticamente. |
| (3) | Definir valor | Parâmetros de controle de vibração atualmente em uso. |
| (4) | Valor calculado | Calcule o valor numérico derivado. |
| (5) | | Aplique o conteúdo do valor calculado ao valor definido. |
| (6) | | Aplique o conteúdo do campo "Definir valor" ao campo "Valor calculado". |
Configuração de controle de vibração: É eficaz para suprimir a vibração durante a parada, e o valor de configuração geral é de 5 a 10. O valor de configuração pode ser calculado rapidamente com base na forma de onda do torque, e é difícil configurá-lo corretamente na primeira vez.
Configuração fácil - Detecção de colisão

| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção de eixos | A seleção do eixo a ser definida. |
| (2) | Variação máxima de torque |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







