
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
Em nosso uso diário de um robô IML, é uma boa prática fazer backup do programa após a configuração dos parâmetros, caso ocorra algum erro de operação ou configuração no futuro. Neste capítulo, discutiremos como exportar o programa do robô IML para um pen drive e como recarregar um programa a partir do pen drive.
Os seguintes requisitos devem ser atendidos ao usar o PENDANT para baixar o programa:
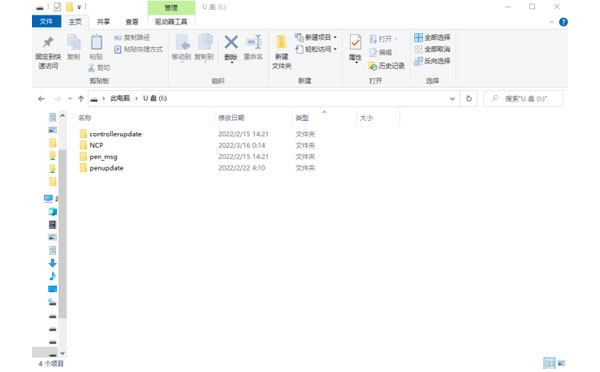
Primeiramente, você precisa criar 4 novas pastas no diretório raiz do USB:
[penupdate], [pen_msg], [controllerupdate], [NCP]
Coloque o arquivo baixado na pasta correspondente, conforme a tabela abaixo:
Lista de arquivos correspondentes
| Pasta à esquerda | Arquivo à direita | Ilustrar | |
|---|---|---|---|
| [penupdate] | pne_set | configuração de pingente | a reinicialização entra em vigor |
| pendant-gui | Arquivo executável Qt para Linux | ||
| pen_msg | all_msg.txt | Informações textuais do pingente | |
| Outras mensagens... | Informações textuais do pingente | ||
| [controllerupdate] | TRC1000.dsb | Programa de ação do controlador | |
| TRC1000.dop | Inicialização e configuração do controlador | ||
| motc.dat | Programas de controle de movimento | ||
| machine01 | Programa de parâmetros mecânicos 01 | ||
| ... | ... | ||
| machine32 | Programa de parâmetros mecânicos 32 | ||
| [NCP] | NCP01.NCP | NCP File | Compila para entrar em vigor |
| ... | |||
| NCP99.NCP | Arquivo NCP | ||
Insira o USB na porta USB do aparelho. Recomenda-se escolher um USB de marca comum, que não tenha sido modificado para esse fim.
Toque no ícone [Gerenciamento de Arquivos] na parte superior da tela  , selecione [Importar do USB].
, selecione [Importar do USB].
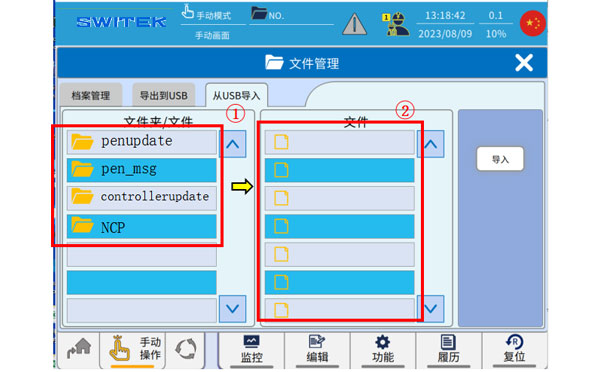
Quando um arquivo é reconhecido no USB, [Importar do USB] exibe a pasta preparada previamente na unidade flash USB.
Clique para selecionar a pasta em (2) para exibir os subarquivos na pasta em (1), selecione os subarquivos que deseja importar e clique em Importar. (Se você selecionar apenas (2) e clicar em [Importar], todo o conteúdo da pasta será baixado).
Após a conclusão do download, o arquivo baixado será reiniciado de acordo com as instruções do arquivo baixado, e o arquivo baixado entrará em vigor após a reinicialização.
Para obter detalhes sobre se é necessário reiniciar, consulte a [Tabela de Download de Arquivos].
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







