
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
A seção "Ensino" permite que você revise e edite o programa do robô IML. Como um sistema de controle modular, após a seleção do modo, configuração dos parâmetros, do temporizador e do contador, você obterá um programa inicial para o seu projeto IML. Na página "Ensino", você pode fazer alguns ajustes menores no programa para que o robô IML funcione com mais eficiência.
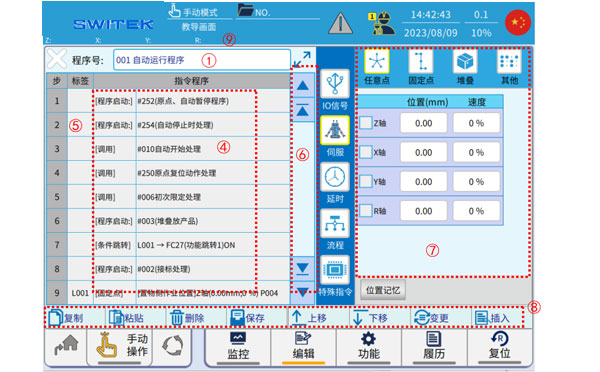
Descrição de cada área de marcação:
| Não. | Nome | Função |
|---|---|---|
| (1) | Seleção/Exibição de Programas | Clique na janela pop-up "Lista de Programas", selecione o número do programa que deseja adicionar, editar ou visualizar e clique para entrar na interface de edição. |
| (2) | Exibição de extensão do programa | Clique em  , entre na interface estendida da tela do programa para fácil observação do conteúdo completo do comando. , entre na interface estendida da tela do programa para fácil observação do conteúdo completo do comando. |
| (3) | Retornar | Clique para sair da interface de edição do tutorial. Se o programa tiver sido alterado, será solicitada a compilação. |
| (4) | Conteúdo das instruções | O conteúdo do comando é exibido. |
| (5) | Coluna de rótulos | Acesse a área de edição da aba. Clique para adicionar um rótulo antes da linha de comando (ao criar um novo rótulo, você pode clicar em "EN" sem inserir um número, e um número de rótulo não utilizado será adicionado automaticamente). |
| (6) | Uma lista de instruções de primeiro nível |
|
| (7) | Lista secundária de comandos e configurações de parâmetros | Edição de comandos em sublistas e configuração de parâmetros. |
| (8) | Atalhos de edição de comandos |
|
| (9) | Exibição da posição do eixo | A posição atual de cada eixo é exibida para facilitar a observação. |
Abaixo, detalhes sobre como "ensinar" um programa de robô IML:
Clique na área de exibição do nome do programa para acessar a lista de programas.
A interface é a seguinte:
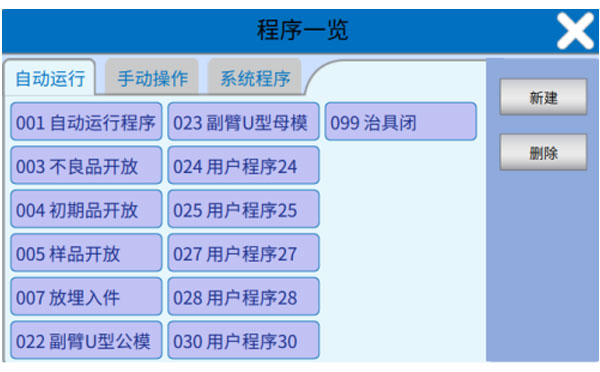
Execução automática (001-099): 001 é o programa principal que pode ser editado pelo usuário, 024-083 são sub-rotinas criadas e editadas pelo usuário.
Operação manual (#178-#249):
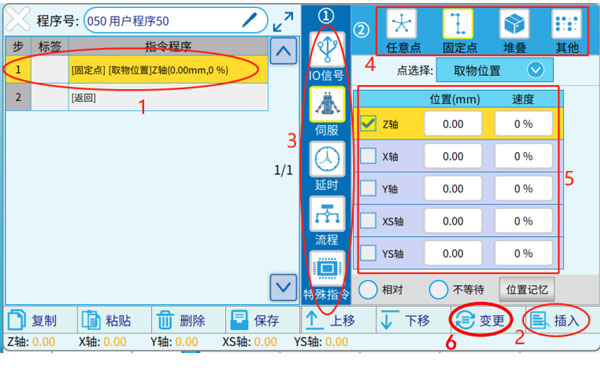
A interface de edição é como mostrado na figura acima, e a nova linha de comando é dividida nas seguintes 6 etapas:
Abaixo estão alguns dos comandos mais usados:
Ao ensinar programação de aplicativos, não é recomendável que os usuários editem a lógica básica dos pontos X e Y para o controle de E/S padrão da máquina de moldagem por injeção e do manipulador (IML Robot, neste caso), e devem chamar a sub-rotina de função do sistema para garantir a precisão do programa. Essas sub-rotinas estão localizadas na classe "Sinais de E/S".
Conforme mostrado na figura acima, as etapas de programação são definidas passo a passo de acordo com 1 (Categoria principal), 2 (Subcategoria), 3 (Instruções específicas) e 4 (Parâmetros específicos) e, após a conclusão, clique em "Alterar" ou "Inserir".
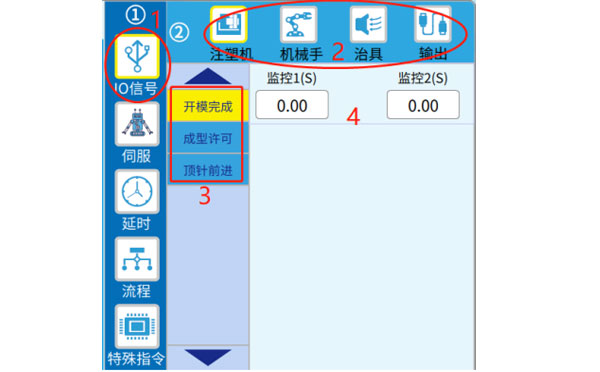
Ao editar as funções de conveniência relacionadas ao robô IML, você pode usar os botões na figura a seguir para operar os dispositivos relacionados ao robô IML (você pode observar o LIGADO/DESLIGADO do sinal de detecção ligando ou desligando o ponto à direita  ), o que facilita a programação de simulações em cenários operacionais do mundo real.
), o que facilita a programação de simulações em cenários operacionais do mundo real.

Para editar a lógica de saída do ponto de E/S, a interface de edição é a seguinte:
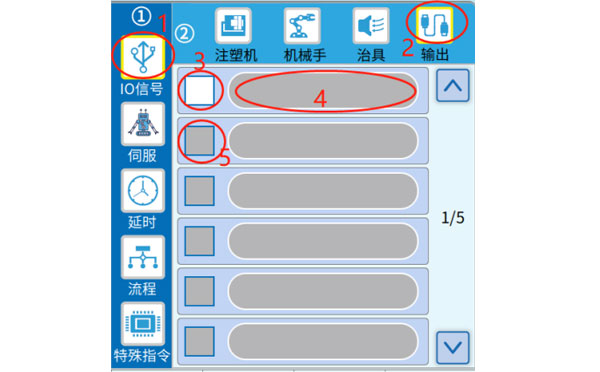
Na interface de edição da figura acima, clique no rótulo número 3 para √, a marca 4 se tornará editável, selecione o ponto Y LIGADO ou DESLIGADO para ser exibido e confirme. Se você quiser exibir os pontos Y do robô IML ao mesmo tempo, no designador 5, √ para começar a editar a saída do segundo ponto Y. Quando terminar, clique em "Alterar" ou "Inserir".
Edite os comandos de movimento do servo eixo, incluindo o movimento para um ponto fixo (o ponto é definido, pode ser modificado em na "Configuração de Posição" e pode ser referenciado), qualquer ponto, ponto empilhado (a posição é definida em "Empilhar" no menu), e o comando de retorno do eixo à origem, etc. Tomemos como exemplo um ponto fixo:
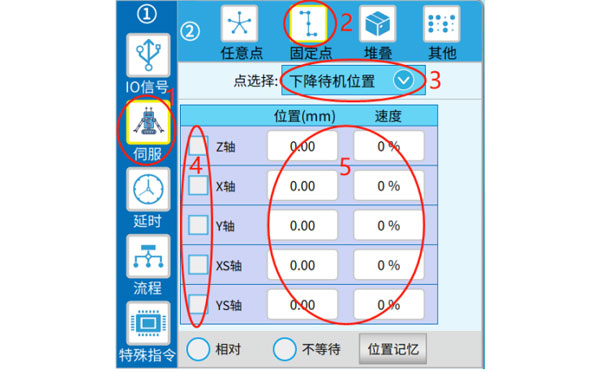
Como mostrado na figura acima, selecione o ponto específico na etiqueta 3, depois selecione o eixo de movimento na etiqueta 4 e defina o ponto e a velocidade na etiqueta 5. Quando terminar, clique em "Alterar" ou "Inserir".
Existem dois tipos de comandos de atraso de edição: especificar o tempo e especificar o temporizador (o tempo do temporizador pode ser alterado quando executado automaticamente).
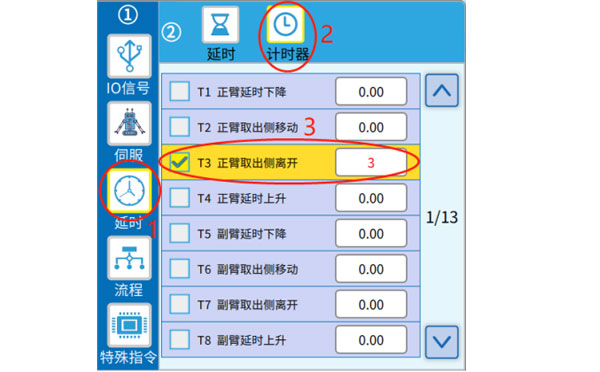
Nota: Se você quiser usar um temporizador ao ensinar programação, prefira o T85-T100, que são temporizadores de usuário que não são especificamente definidos.
A invocação e a inicialização do programa são ambas formas de usar sub-rotinas. A diferença é que, quando uma sub-rotina é chamada, ela espera que a execução da instrução na sub-rotina termine (até a instrução "return"), e a chamada é considerada concluída, e a próxima instrução pode ser executada no programa principal. Por outro lado, você não precisa esperar que a sub-rotina de inicialização seja executada e pode iniciar diretamente a próxima etapa do programa principal (o programa principal e a sub-rotina são executados em paralelo).
Os passos para editar o comando de inicialização do programa são os seguintes:
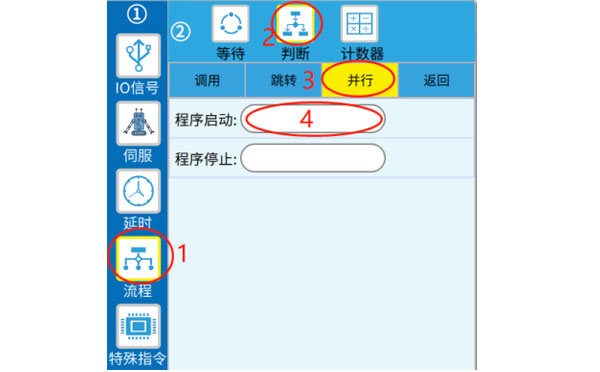
Nota: O programa inicia o subprograma aberto, que pode ser fechado pelo comando "Parar programa" acima (em circunstâncias normais, o subprograma será fechado automaticamente após a conclusão da execução e o recebimento da instrução "retorno").
Os passos para editar o comando de invocação são os seguintes:
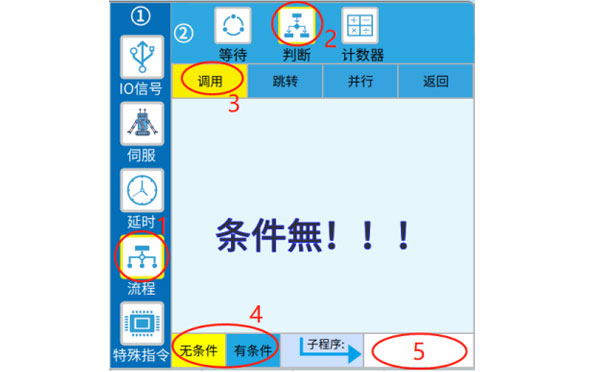
Conforme mostrado no ícone número 4 acima, ao editar a instrução de chamada, você pode escolher se deseja definir a condição, selecionando "incondicional" e, em seguida, definindo o número da sub-rotina a ser chamada na marca 5 para concluir a chamada. Se você selecionar "condicional", você precisa concluir a configuração da condição primeiro, depois definir o número do programa nos rótulos 6 e clicar em "Alterar" ou "Inserir".
Observe que, quando o julgamento condicional anterior não for verdadeiro, a chamada subsequente não será executada, mas a próxima linha de instruções será iniciada.
Comando de salto: O programa é executado para o comando de salto e a próxima etapa executará a linha de comando com a tag correspondente, em vez de executá-la na próxima ordem.
Para editar o comando Jump/conditional Jump, siga os passos abaixo:

Selecione se deseja definir condições no rótulo 4, definir condições no rótulo 5 (você pode definir várias condições), definir os números dos rótulos no rótulo número 6 e selecione "Alterar" ou "Inserir" para gerar comandos. Em seguida, preencha a coluna de rótulos mostrada no rótulo número 7, antes da linha de comando de destino.
Se um salto "condicional" for usado, a condição anterior não será válida e o salto subsequente não será executado, e a próxima linha de instruções será iniciada diretamente. Se a condição for verdadeira, execute a linha de comando que salta para o rótulo.
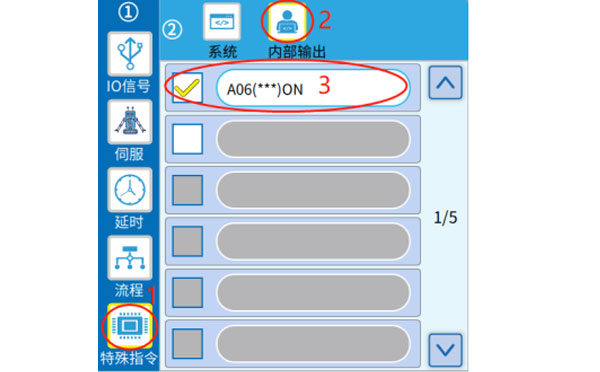
A saída do sinalizador interno é LIGADO/DESLIGADO, e o procedimento de edição é mostrado no ícone numerado abaixo.
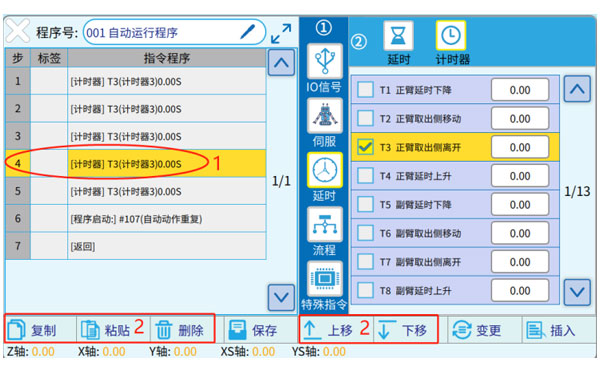
Conforme mostrado no ícone número 1 acima, selecione a linha de comando que deseja editar (ficará amarela) e, em seguida, use o botão com a etiqueta 2 para executar a operação.
As funções de cada botão são as seguintes:
Quando o programa estiver editado, você pode clicar em "Salvar" ou " " ou ir para outras páginas de configurações para acionar o prompt de "Compilação", clicar em "Sim" e aguardar a conclusão da edição (ela será salva automaticamente após a compilação).
" ou ir para outras páginas de configurações para acionar o prompt de "Compilação", clicar em "Sim" e aguardar a conclusão da edição (ela será salva automaticamente após a compilação).

Alterne o botão no canto superior esquerdo do painel de controle para AUTO para entrar na interface de operação automática. Vá para o modo de programação, como mostrado abaixo, e clique no ícone " " mostrado na etiqueta 1, para entrar na tela de exibição expandida. Clique na etiqueta 2 "Passo único" para entrar no modo de passo único, pressione o botão da etiqueta 3 " " uma vez, e o programa avançará para o passo 1.
" uma vez, e o programa avançará para o passo 1.
O progresso do programa pode ser visualizado no número 4, "Número do Programa" é o número do programa que está sendo executado e "Número da Etapa" é o número do programa que está sendo executado.

Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







