
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
A página "Configuração ACC" aqui serve para o operador do robô SWITEK IML definir a velocidade de aceleração/desaceleração de cada eixo do robô IML para que ele funcione de forma eficiente e estável.
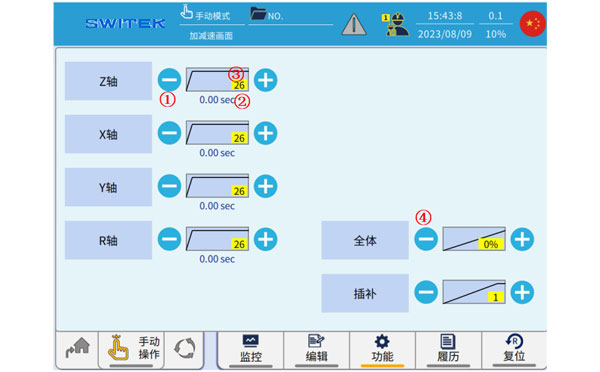
| Não. | Nome | Função |
|---|---|---|
| (1) | Engrenagens "-""+" | Utilize os botões "-" e "+" para ajustar a engrenagem de aceleração e desaceleração do eixo do robô IML. |
| (2) | 0.00 sec | São exibidos os tempos atuais de aceleração e desaceleração do eixo do robô IML. |
| (3) | 1~26 Engrenagens | O tempo de aceleração e desaceleração da primeira marcha é o máximo, definido pelo parâmetro "tempo máximo de aceleração e desaceleração" nas configurações mecânicas. O tempo de aceleração e desaceleração da 26ª marcha é o menor, definido pelo parâmetro mecânico "tempo mínimo de aceleração e desaceleração". |
| (4) | Toda aceleração e desaceleração | Clique para alterar as configurações de tempo de aceleração e desaceleração para todos os eixos. |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







