
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:Robô IML; Operação de Robô IML; Robótica de Rotulagem em Molde
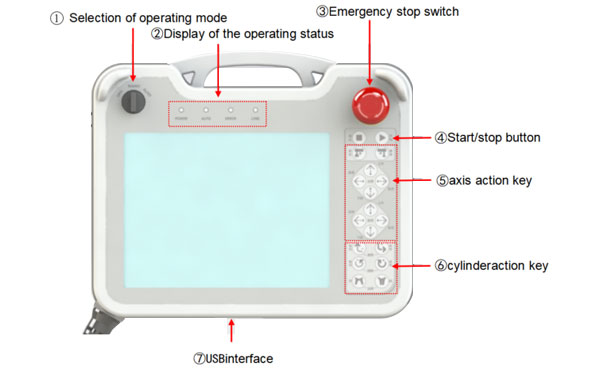
O painel de controle do robô IML oferece uma IHM (Interface Homem-Máquina) fácil de operar para que os operadores do robô IML iniciem o sistema, programem ou diagnostiquem o sistema IML. Neste capítulo, ajudaremos você a ter uma melhor compreensão da caixa de controle do robô IML e da função de cada parte do painel.
Frente:
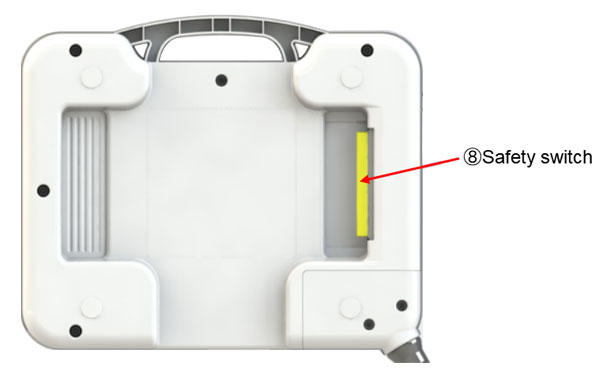
Verso:
| Não. | Nome | Funções |
|---|---|---|
| 1 | Seleção do modo de operação | Alternar entre os modos origem/manual/automático |
| 2 | Exibição do status operacional |
|
| 3 | Interruptor de parada de emergência | Parada de emergência do robô de retirada de pedidos. Para liberar a parada de emergência, gire a chave no sentido horário. |
| 4 | Botão Iniciar/Parar | Iniciar/pausar operação automática. |
| 5 | Tecla de ação do eixo | Com a chave de segurança, os cinco eixos podem ser movidos nas direções positiva e negativa. |
| 6 | Chave de ação do cilindro | Com a chave de segurança, o funcionamento do cilindro é controlado. |
| 7 | Interface USB | Interface de comunicação para upload e download de dados no painel de controle. |
| 8 | Interruptor de segurança | Durante a operação manual, se esta tecla for pressionada, todas as ações das teclas de ação manual poderão ser executadas. |
TSM-1000P:
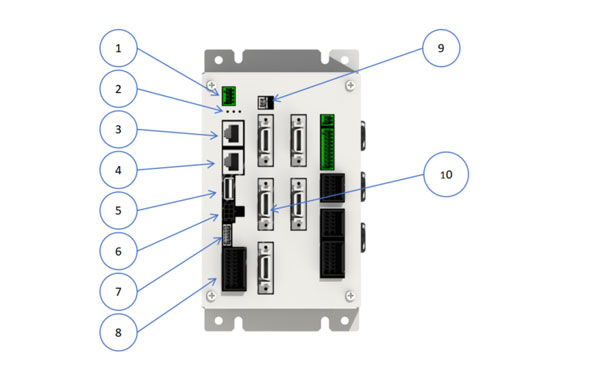
Descrição detalhada da fiação:
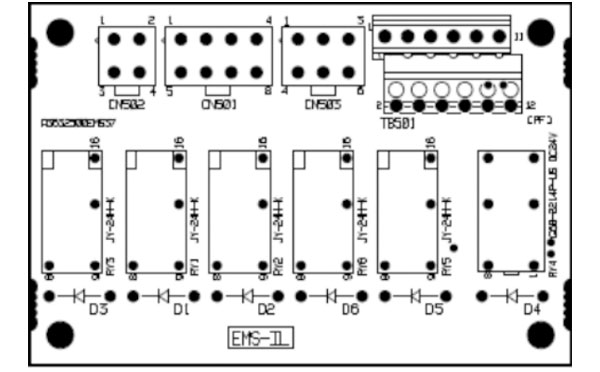
CN501:
| ALFINETE | Rótulo | Nome | Observação |
|---|---|---|---|
| 1 | X00 | Sinal de braço M para cima | Fiação para TIO-A |
| 2 | X07 | Sinal de braço S para cima | Conexão ao TIO-A (curto-circuito quando Tri-eixo) |
| 3 | X18 | Zona de colocação | Fiação para TIO-A |
| 4 | 24G | 24G | Sem fios |
| 5 | 24G | 24G | |
| 6 | 24G | 24G | |
| 7 | 24G | 24G | |
| 8 | 24G | 24G |
CN502:
| ALFINETE | Rótulo | Nome | Observação |
|---|---|---|---|
| 1 | RY2 | Saída de relé (não utilizada) | não utilizado |
| 2 | 24V | 24V | Conecte a alimentação L+ |
| 3 | 24G | 24G | |
| 4 | 24G | 24G | Conecte a alimentação L- |
CN503:
| ALFINETE | Rótulo | Nome | Observação |
|---|---|---|---|
| 1 | MP_ON_1 | Servo ligado | Conecte a porta de E/S no controlador (MOT). |
| 2 | EMS_1 | Saída de sinal EMS | |
| 3 | EMS_SW_1 | Entrada de sinal EMS | |
| 4 | MP_ON_2 | Servo contator ligado | |
| 5 | EMS_2 | saída de sinal EMS | |
| 6 | EMS_SW_2 | Entrada de sinal EMS |
TB501:
| ALFINETE | Rótulo | Nome | Observação |
|---|---|---|---|
| 1 | EMS OUT1 | Saída EMS da máquina de retirada 1 | Conecte o cabo de linha 23 (o cabo conectado à máquina de moldagem por injeção). |
| 2 | EMS OUT2 | Saída EMS da máquina de retirada 2 | Conecte o cabo de linha 24 |
| 3 | Y35 | Ativar fechamento MLD | Conecte o pino 2 em CN302 no PIO |
| 4 | Y35 | Ativar fechamento MLD | Conecte o pino 6 no conector CN302 do PIO. |
| 5 | Y35 | Ativar fechamento MLD | Conecte o cabo de linha 10 |
| 6 | Y35 | Ativar fechamento MLD | Conecte o cabo da linha 11 |
| 7 | EMSIN_1(24V) | Entrada de sinal EMS externo 1 | Conecte os pinos 7 e 8 quando não estiver usando o sinal externo de parada de emergência. |
| 8 | EMSIN1_1 | Entrada de sinal EMS externo 1 | |
| 9 | EMSIN1_2 | Entrada de sinal EMS externo 2 | Conecte os pinos 9 e 10 quando não estiver usando o sinal externo de parada de emergência. |
| 10 | EMSIN1_2 | Entrada de sinal EMS externo 2 | |
| 11 | EMSIN1_3 | Entrada de sinal EMS externo 3 | Conecte os pinos 11 e 12 quando não estiver usando o sinal externo de parada de emergência. |
| 12 | EMSIN1_3 (24G) | Entrada de sinal EMS externo 3 |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







