
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palavras-chave:SISTEMA DE ENCHIMENTO DE PLACAS DE PETRI, SOLUÇÕES DE MOLDAGEM POR INJEÇÃO DE PLACAS DE PETRI
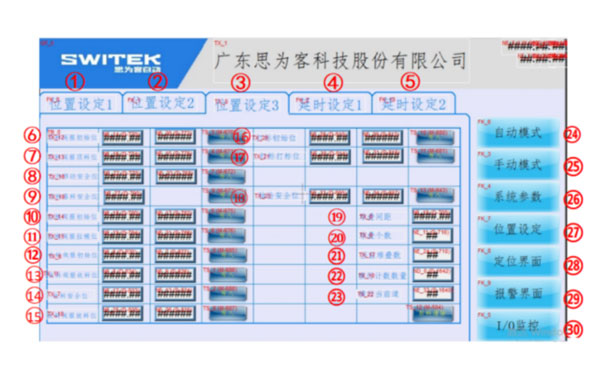
As páginas de configuração de posição são para o operador do sistema de empacotamento de placas de Petri SWITEK, definindo de onde os braços robóticos devem pegar a placa de Petri e por onde as placas de Petri devem ser colocadas, empilhadas ou empacotadas. Neste capítulo, apresentaremos a configuração da posição do eixo do sistema de empacotamento de placas de Petri com entrada lateral SWITEK.
Configuração de posição 1

| Não. | Descrição |
|---|---|
| 1 | Configuração de posição 1 (Configuração de posição 1) 400 |
| 2 | Configuração de posição 2 (Conjunto de posição 2) 401 |
| 3 | Configuração de posição 3 (Configuração de posição 3) 402 |
| 4 | Configuração de atraso 1 (Conjunto de atraso 1) |
| 5 | Posição de Liberação das Peças do Braço Principal (Main Arm Rsl) 425 |
| 6 | Posição de espera do braço principal (Braço principal Sby) 426 |
| 7 | Posição de coleta da placa de Petri do braço principal (Coleção do braço principal) 427 |
| 8 | Posição em que o braço principal pode iniciar um pré-ativo (Avanço do braço principal) 428 |
| 9 | Posição de Exceção do Braço Principal (Exceção do Braço Principal) 429 |
| 10 | Posição de Habilitação de Fechamento do Molde (Permitir Fechamento Seguro do Molde) 430 |
| 11 | Posição inicial de coleta da placa de Petri (Mat Coll Init) 431 |
| 12 | Posição de coleta em placa de Petri (Mat Coll) 432 |
| 13 | Posição final de seleção da placa de Petri (Mat Coll Cmp) 433 |
| 14 | Posição segura para finalização da seleção em placa de Petri (Mat Coll Safe) 434 |
| 15 | Posição de seleção e colocação em placas de Petri (Mat Rel) 435 |
| 16 | |
| 17 | Posição anormal de coleta/colocação em placa de Petri (Localização da anomalia) 582 |
| 18 | Posição de segurança de abertura (Flip Safe) 437 |
| 19 | Posição de transferência invertida (Flip Trans) 438 |
| 20 | Posição segura para virar e posicionar a placa de Petri (Flip Rel Safe) 439 |
| 21 | Posição de partida segura com inversão de marcha (Partida segura com inversão de marcha) 440 |
| 22 | Posição de inversão da placa de Petri (Relação de inversão) 441 |
| 23 | Posição final para virar a placa de Petri (completo) 442 |
| 24 | Posição de segurança para virar a placa de Petri (posição de segurança completa para virar) 443 |
| 25 | Modo automático (Auto) |
| 26 | Modo manual (Manual) |
| 27 | Parâmetros do sistema (Sys Params) |
| 28 | Configurações de posição (Pos Set) |
| 29 | Interface de posição (Interface Pos) |
| 30 | Interface de alarme |
| 31 | Monitor de E/S (I/O Mon) |
Configuração de posição 2

| Não. | Descrição |
|---|---|
| 1 | Configuração de posição (Configuração de posição 1) 400 |
| 2 | Configuração de posição (Configuração de posição 2) 401 |
| 3 | Configuração de posição (Configuração de posição 3) 402 |
| 4 | Configuração de atraso (Conjunto de atraso 1) 403 |
| 5 | Posição inicial de inversão da placa de Petri (Início da inversão) 405 |
| 6 | Virar a placa de Petri no mesmo lugar (Virar) 406 |
| 7 | Posição inicial de queda da placa de Petri (bloqueio inicial) 583 |
| 8 | Posição de gotejamento da placa de Petri (descarga em branco) 584 |
| 9 | Posição inicial de empilhamento da placa de Petri (Stack Init) 407 |
| 10 | Posição de queda das placas de Petri empilhadas (queda em pilha) 408 |
| 11 | Posição de parada da esteira transportadora de empilhamento de placas de Petri (Parada da esteira) 585 |
| 12 | Posição inicial para cima/para baixo (unidade para cima-para baixo) 409 |
| 13 | Posição de espera para cima/para baixo (para cima-para baixo em) 410 |
| 14 | Posição de coleta da placa de Petri de cima para baixo 411 |
| 15 | Posição completa de coleta da placa de Petri de cima para baixo (Up-Dwn Coll Cmpl) 412 |
| 16 | Posição de espera para liberação da placa de Petri (Up-Dwn Rel Sby) 413 |
| 17 | Posição de liberação da placa de Petri para cima e para baixo (Up-Down Rel) 414 |
| 18 | Posição final de liberação da placa de Petri para cima e para baixo (Up-Down Rel Cmpl) 415 |
| 19 | Posição de coleta horizontal da placa de Petri (Horiz Coll1) 416 |
| 20 | Posição de coleta horizontal da placa de Petri (Horiz Coll 2) 417 |
| 21 | Posição de coleta horizontal da placa de Petri (Horiz Coll 3) 418 |
| 22 | Posição de coleta horizontal da placa de Petri (Horiz Coll 4) 419 |
| 23 | Posição de espera horizontal da placa de Petri (Horiz Standby) 586 |
| 24 | Posição de liberação horizontal da placa de Petri (Horiz Rel) 420 |
| 25 | Modo automático (Auto) |
| 26 | Modo manual (Manual) |
| 27 | Parâmetros do sistema (Sys Params) |
| 28 | Configuração de posição (Configuração de posição) |
| 29 | Interface de posição (Interface Pos) |
| 30 | Interface de alarme |
| 31 | Monitor de E/S (I/O Mon) |
Configuração de posição 3
| Não. | Descrição |
|---|---|
| 1 | Configuração de posição 1 (Configuração de posição 1) 400 |
| 2 | Configuração de posição 2 (Conjunto de posição 2) 401 |
| 3 | Configuração de posição 3 (Configuração de posição 3) 402 |
| 4 | Configuração de posição 3 (Configuração de posição 3) 402 |
| 5 | Configuração de atraso (Conjunto de atraso 2) 404 |
| 6 | Posição inicial do servo de abertura da placa de Petri (Posição inicial superior) 421 |
| 7 | Posição de defecação do servo de placa de Petri (posição superior) 422 |
| 8 | Posição Segura em Movimento (Segurança em Movimento) 587 |
| 9 | Posição de segurança para queda da tampa da placa de Petri (Posição de segurança em branco) 730 |
| 10 | Posição inicial do servo de tração da manga (inicialização do molde de tração) 423 |
| 11 | Posição inicial de puxamento da manga (molde de puxamento) 424 |
| 12 | Posição inicial de coleta da placa de Petri (Mat Coll Init) 479 |
| 13 | Posição de coleta da placa de Petri (Estação de coleta) 576 |
| 14 | Posição segura para coleta em placa de Petri (RecServo SP) 709 |
| 15 | Posição de liberação das peças do servo de coleta da placa de Petri (Mat Coll Rel) 480 |
| 16 | Marcar posição inicial de impressão (Maring Init Pos) 731 |
| 17 | Posição de impressão da marca (Ajustar posição da margem) 732 |
| 18 | Posição de Segurança para Amostragem (Verificação Pontual Segura) 746 |
| 19 | Espaço de empilhamento 481 |
| 20 | Número Empilhado (Número de Pilhas) 482 |
| 21 | Número atual de pilhas (contagem de pilhas): 694 |
| 22 | Número de contagem horizontal (Horiz Mat Ctr) 483 |
| 23 | Contagem de Corrente Horizontal (Contagem de Comportamento Desenfreado) 748 |
| 24 | Modo automático (Auto) |
| 25 | Modo manual (Manual) |
| 26 | Parâmetros do sistema (Sys Params) |
| 27 | Configurações de posição (Pos Set) |
| 28 | Interface de posição (Interface Pos) |
| 29 | Interface de alarme |
| 30 | Monitor de E/S (I/O Mon) |
Contate a SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







