Instruções de instalação de braços robóticos SWITEK para máquinas de moldagem por injeção - Capítulo 7: Configurações de funções
Resumo
A programação de um braço robótico para máquina de moldagem por injeção não envolve apenas a configuração da posição do eixo, ativação/desativação dos cilindros e outras peças do EOAT, etc., mas também inclui as configurações de sinal para que o robô se comunique com a máquina de moldagem por injeção, as configurações do produto, a configuração da pilha, a configuração da máquina, as configurações do sistema, as configurações do ponto de segurança, etc. Neste capítulo, discutiremos como esses parâmetros dos braços robóticos são configurados passo a passo.
No status de parada, clique no item de menu de funções na barra de menu principal para acessar a página de configurações de funções. Conforme mostrado abaixo:
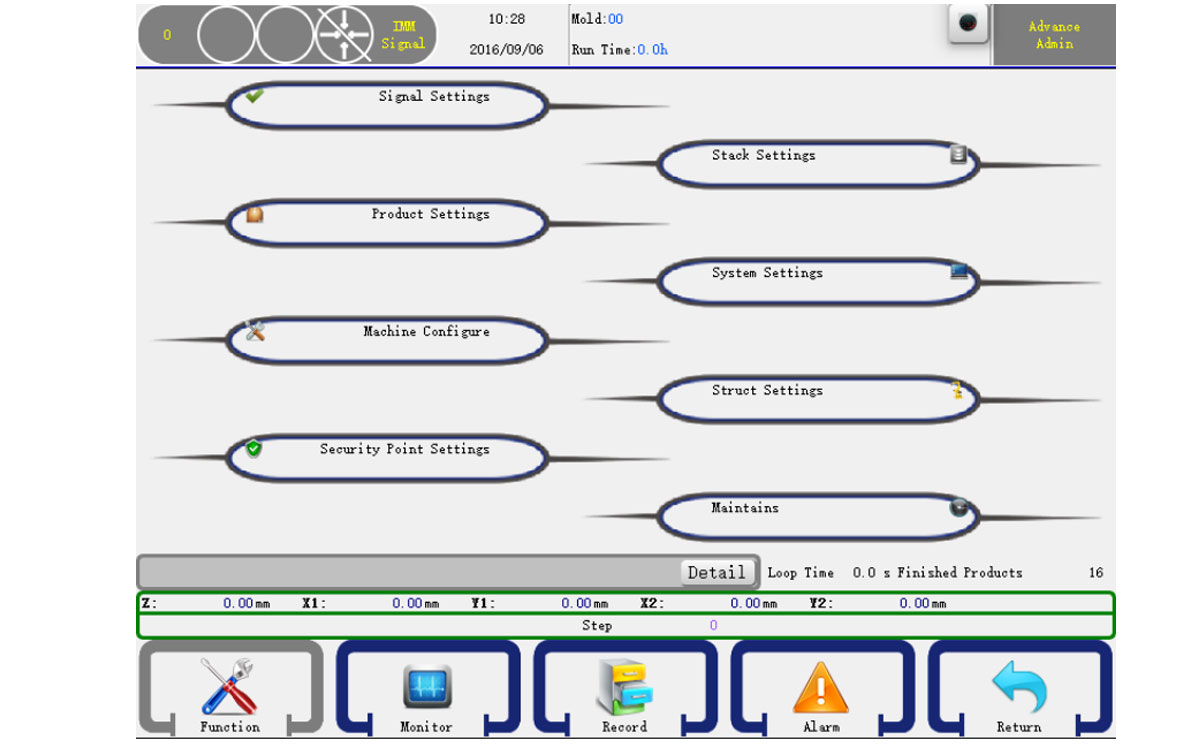
Você pode selecionar o grupo de funções nesta página. Clicar no item abrirá a página de configurações detalhadas correspondente. As Configurações de estrutura só podem ser definidas pelo Administrador Avançado.
7.1 Configurações de sinal
Clique no item Configurações de sinal para acessar a página de configuração de sinal, conforme mostrado abaixo:

- Detectar Equipamento 1-4:
Positivo: Verifique se o sinal de entrada do equipamento está ligado.
Reverso: Verifique se o sinal de entrada do equipamento está desligado. - Sub Luminária
Positivo: Verifique se o sinal de entrada da luminária está ligado.
Reverso: Verifique se o sinal de entrada da luminária está desligado. - Detectar Posição:
Horizontal:A postura deve ser horizontal ao executar a ação de deslocamento.
Vertical:A postura deve ser vertical ao executar a ação de deslocamento.
Sem Limite: Sem Limite: Não detecta. - Detectar Origem:
Horizontal:A postura do braço do robô deve ser horizontal ao executar a ação de deslocamento.
Vertical:A postura do braço do robô deve ser vertical ao executar a ação de deslocamento.
Sem Limite:Sem Limite: Não detecta. - Posição U/D:
Horizontal:A postura do braço do robô deve ser horizontal ao executar a ação de deslocamento.
Vertical:A postura do braço do robô deve ser vertical ao executar a ação de deslocamento.
Sem Limite:Sem Limite: Não detecta. - Hor Standby:
Molde com Bloqueio de Limite: O fechamento do molde é habilitado somente após o braço robótico se mover para a posição de espera.
Molde com Bloqueio de Limite: O fechamento do molde é habilitado assim que o braço robótico começa a se mover para cima. - Fechar Molde:
Uso:O robô entrará no molde para coleta de peças somente após o sinal de Molde Aberto ser emitido após o sinal de Molde Fechado , caso contrário, um alarme de Molde Não Travado será emitido.
Não Usar:O robô não detectará o sinal de Molde Fechado, mas entrará no molde para coleta de peças assim que o sinal de Molde Aberto for recebido. - Detectar Porta de Segurança:
Uso: Alarme quando a porta de segurança estiver aberta quando o robô estiver em execução automática, independentemente da ação.
Não Usar: Alarme quando a porta de segurança estiver aberta ao executar a ação de abaixar o braço. - Detectar Pressão:
Uso: O robô verificará a pressão do ar comprimido; se estiver abaixo do valor padrão, um alarme será acionado.
Sem Uso: Não verificará a pressão. - Detectar Molde Intermediário:
Uso: O robô verificará o sinal do molde intermediário. Se não houver sinal do molde intermediário quando o braço do robô estiver abaixado dentro do molde, um alarme será acionado.
Sem Uso: Não verificar o sinal do molde intermediário. - Bloqueio do Elo de Ejeção:
Uso: O sinal de habilitação do ejetor será desligado após a abertura do molde ser concluída e o sinal "Habilitação do Ejetor" deve ser inserido no programa.
Sem Uso: O sinal de Habilitação do Ejetor estará normalmente ligado. - Execução Automática
Uso: O robô verificará o sinal Automático da máquina de moldagem por injeção. Caso não seja detectado no modo Automático, um alarme será acionado. Sem Uso: O robô não verificará o sinal Automático da máquina de moldagem por injeção.
7.2 Configurações do produto
Clique no botão Configurações do produto para acessar a página de configurações do produto, conforme mostrado abaixo:
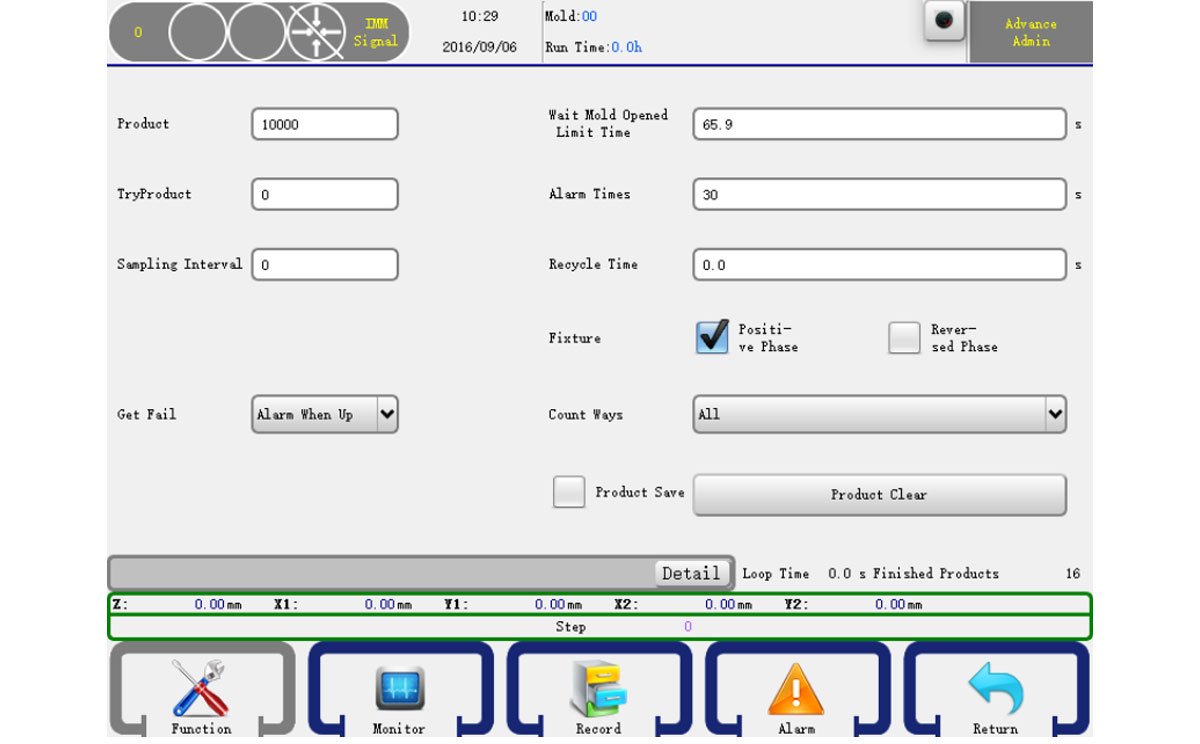
- Produto: Configurando a contagem de produtos, quando acima do número definido, ele emite um alarme.
- Produção experimental: O número de produtos para produção experimental.
- Intervalo de amostragem: O intervalo no qual uma amostra seria coletada para verificação de qualidade.
- Obter Falha:
Alarme de Armação: Armar e disparar o alarme quando o sinal de falha for verificado.
Alarme: Alarme acionado imediatamente após a falha na coleta de peças. - Tempo limitado de espera para abertura do molde: O tempo de espera para o sinal Molde aberto, o robô emitirá um alarme se o tempo de espera for maior que o definido.
- Horários de alarme:O horário de alarme contínuo.
- Limpeza do produto:Limpe a contagem do produto finalizado.
- Tempo de Reciclagem:Ao escolher a função Molde Travado, é o momento em que o sistema recebe o sinal de Molde Fechado para o sinal de Molde Habilitando DESLIGADO.
7.3 Configuração da máquina
Clique no botão Configuração da máquina para acessar a página de configuração da máquina, conforme mostrado abaixo:
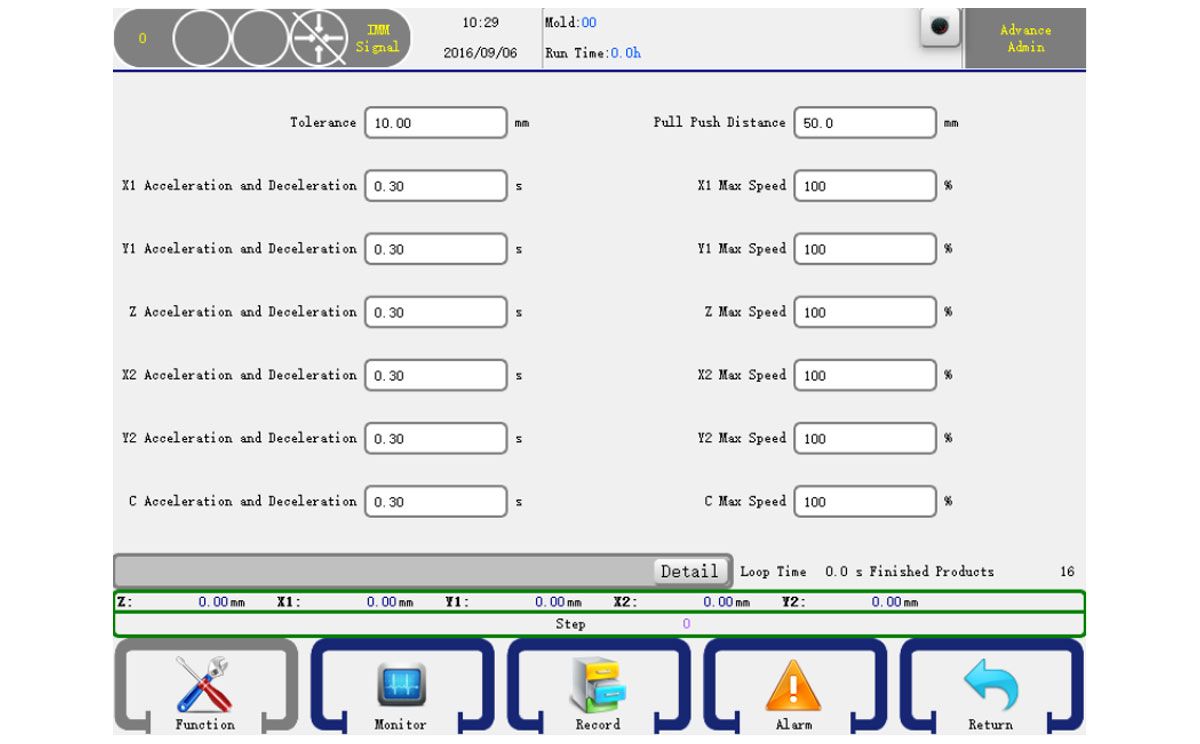
Tolerância: A tolerância entre o pulso enviado e o pulso de feedback do servo.
Zona de Segurança: Uma zona de segurança entre os braços e subbraços.
Aceleração e Desaceleração X, Y, Z: O tempo de aceleração e desaceleração do eixo servo.
Velocidade Máxima X, Y, Z: A velocidade máxima do eixo servo.
7.4 Configurações de pontos de segurança
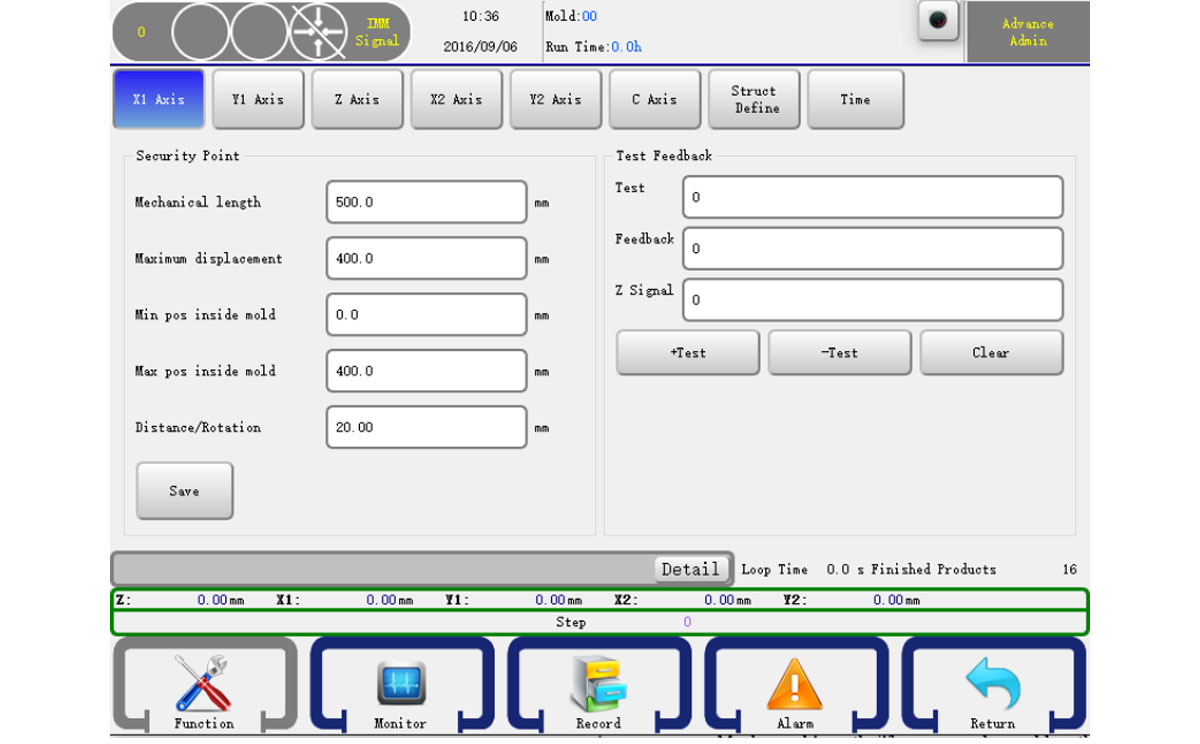
Clique no botão Configurações do ponto de segurança para acessar a página de configurações do ponto de segurança, conforme mostrado abaixo:
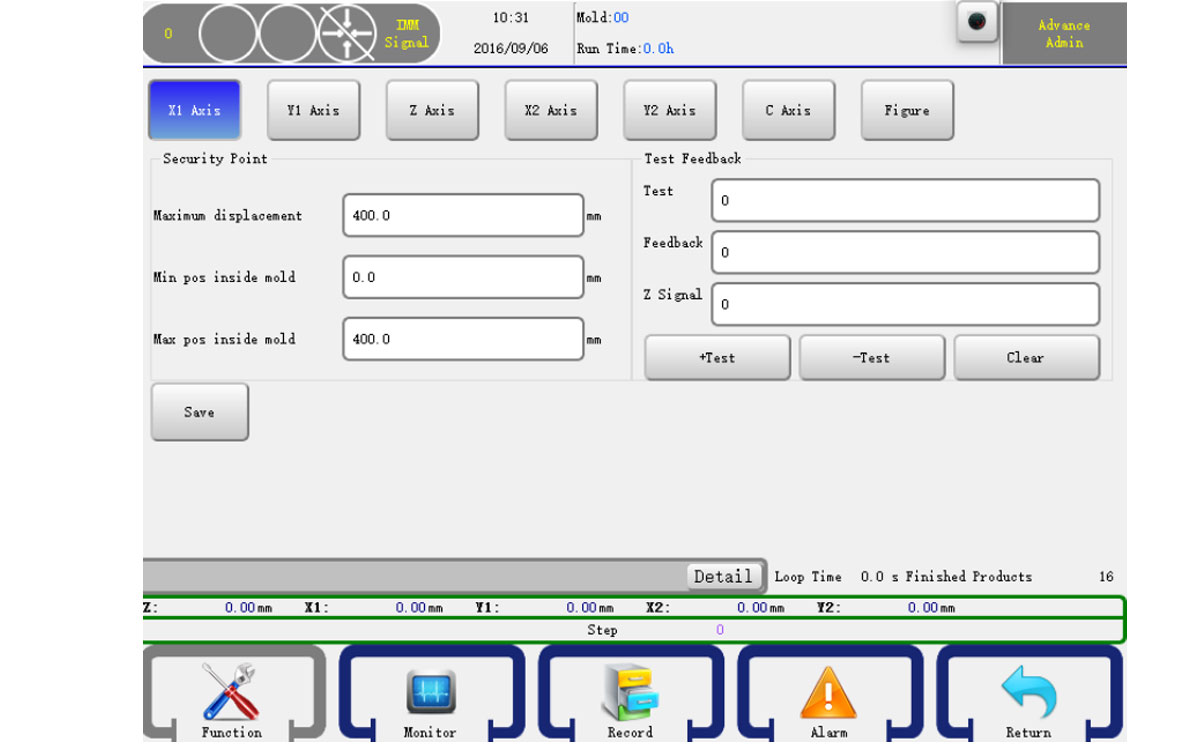
- Pressione o item de menu X na parte superior para selecionar o eixo que deseja visualizar.
Máx:O máximo de movimento do eixo.
Máximo interno:A posição máxima que o eixo pode se mover na máquina.
Mínimo interno:A posição mínima que o eixo pode se mover na máquina.
+Teste:Teste o pulso positivo do servo.
-Teste:Teste o pulso de reserva do servo.
Limpar:Limpar os dados de teste.
Após concluir, basta clicar no botão "Definir i" para confirmar. - Pressione o item de menu Y1 na parte superior para selecionar o eixo que deseja visualizar.
Espera máxima:Defina os pontos máximos do eixo Y1 na posição de espera.
Distância de volta à origem:Posição de Y1 antes da operação OPR.
Pressione o item de menu Y1 na parte superior para selecionar o eixo que deseja visualizar. - Pressione o item de menu Z na parte superior para selecionar o eixo que deseja visualizar.
Zona de segurança interna: Definir um número que representa a zona de segurança interna da máquina.
Zona de segurança externa: Um número de distância de segurança para fora da máquina. - Pressione o item de menu C na parte superior para selecionar o eixo que deseja visualizar.
Faixa de segurança transversal:Um ângulo de segurança ao mover em direção à transversal. - Pressione o item de menu Estrutura na parte superior. Conforme mostrado abaixo:
Aumento mínimo dentro do eixo X: Posição mínima para X quando o braço é levantado na máquina.
Aumento máximo dentro do eixo X: Posição máxima para X quando o braço é levantado.
Aumento mínimo fora do eixo Y: Posição mínima para Y quando o braço é levantado fora da máquina.
Aumento máximo fora do eixo Y: Posição máxima para Y quando o braço é levantado.
Atenção: Você pode modificar a posição mínima e máxima do X no campo de parâmetros do eixo X da página de parâmetros mecânicos.
7.5 Configurações de pilha
Clique no item Configurações da pilha para acessar a página de configurações da pilha, conforme mostrado abaixo:
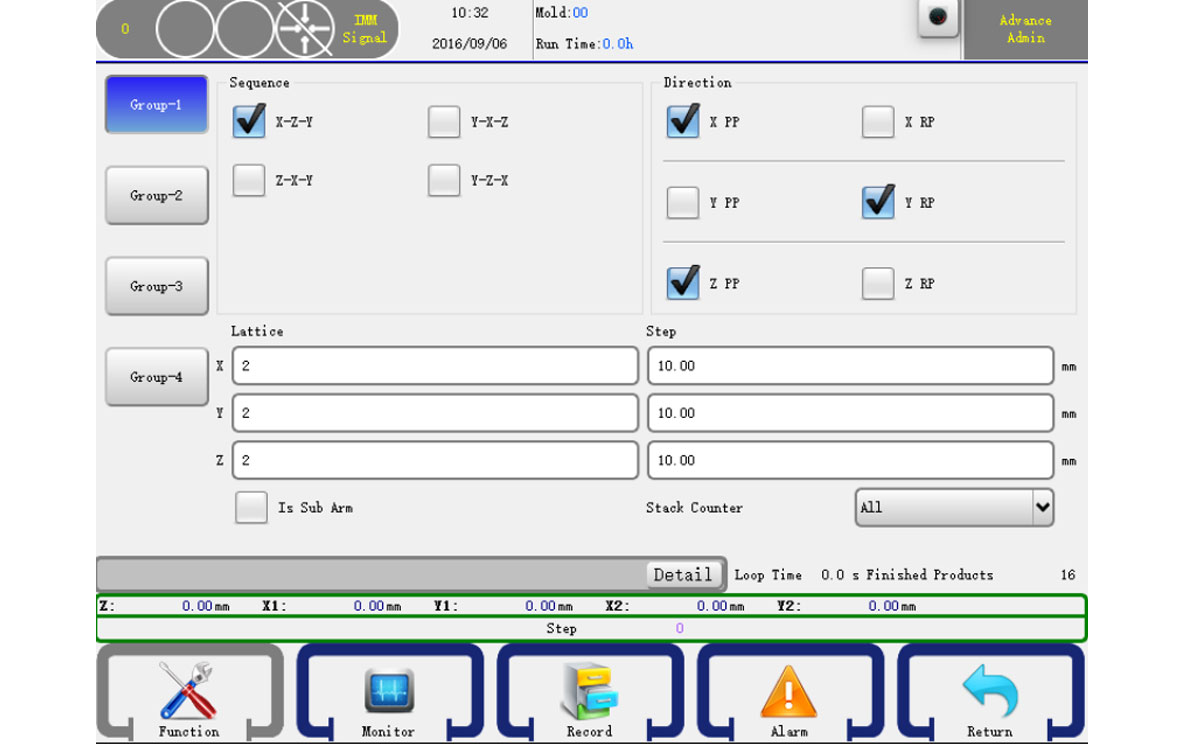
Existem quatro configurações de empilhamento de grupo em nosso sistema.
Sequência: Selecione a sequência de empilhamento
X RP: Se marcada, o robô empilhará em reverso no eixo X.
Y RP: Se marcada, o robô empilhará em reverso no eixo Y.
Z RP: Se marcada, o robô empilhará em reverso no eixo Z.
7.6 Configurações do sistema
7.6.1 Configuração
Clique no item Configurações do sistema para acessar a página de configurações do sistema, conforme mostrado abaixo:
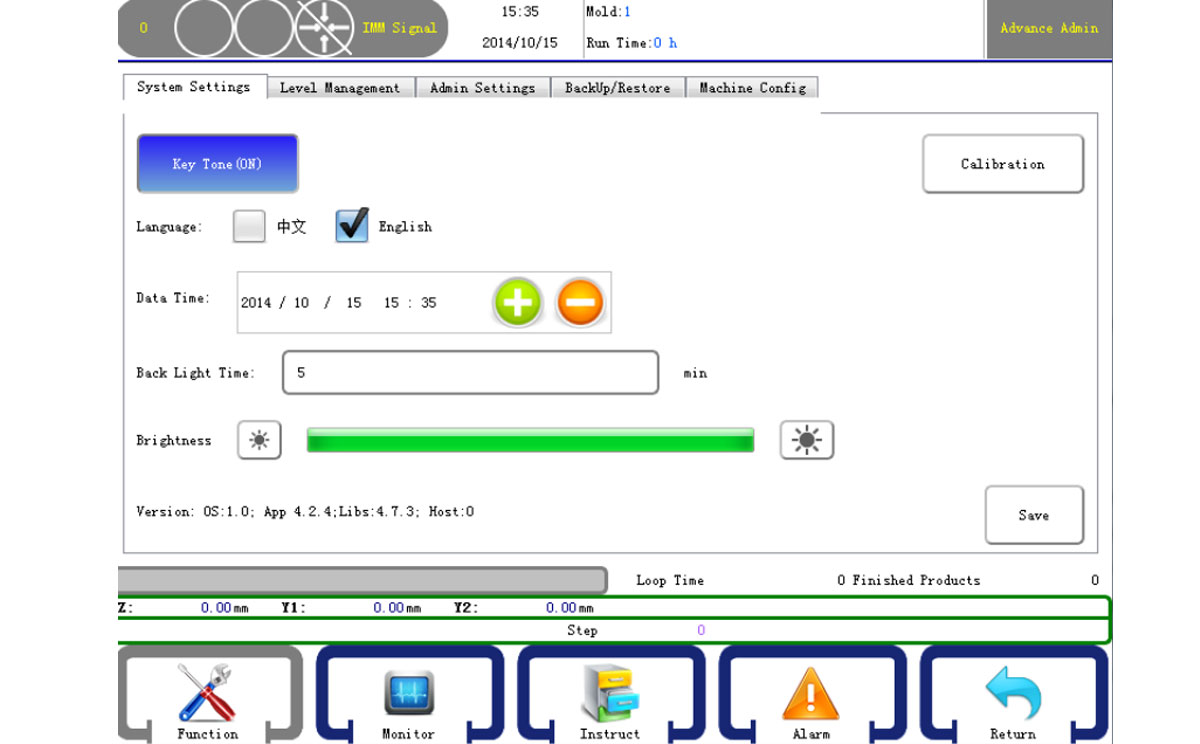
Tom das Teclas: Ao pressionar, o teclado emitirá um bipe se estiver ligado.
Idioma: Selecione o idioma da interface.
Data e Hora: Defina a data e hora atuais.
Hora da Luz de Fundo: Se nenhuma ação for tomada durante a configuração, a luz de fundo será desligada.
Versão: A versão do sistema.
Clique em Salvar para confirmar após concluir as configurações do sistema.
7.6.2 Gerenciamento de níveis
Clique no item Gerenciamento de níveis para acessar a página de configurações do sistema, conforme mostrado abaixo:
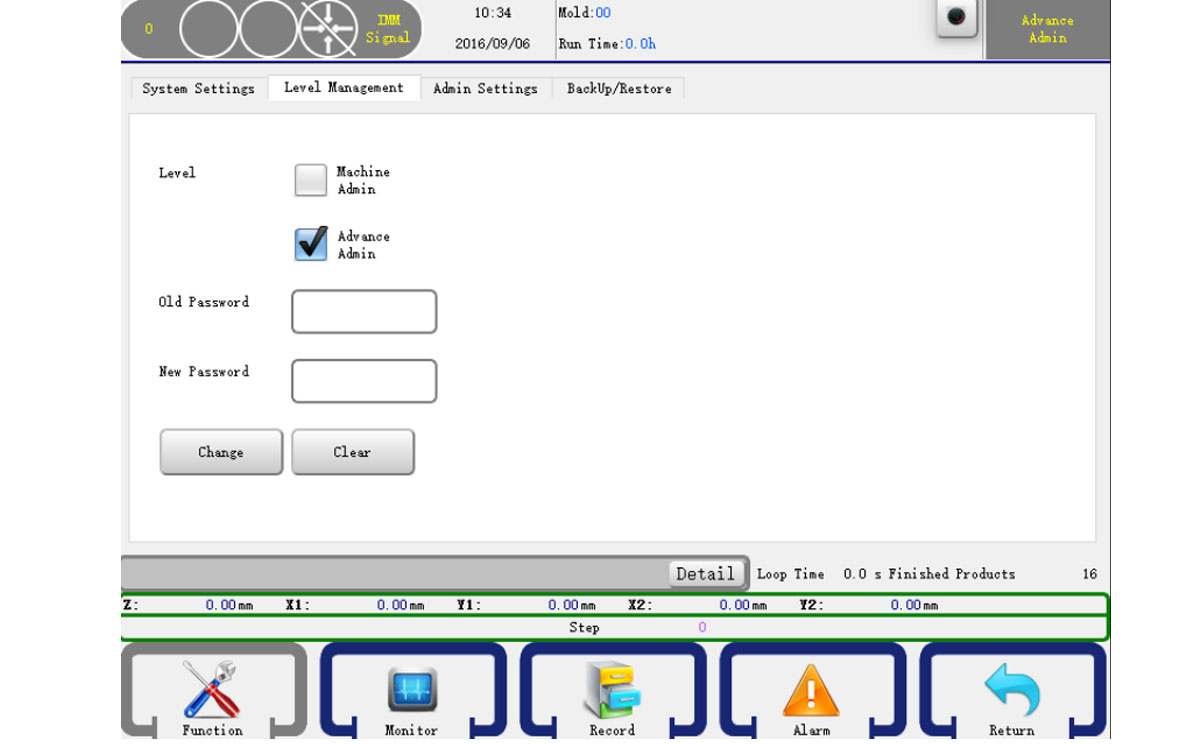
O nível de gerenciamento pode alterar as informações básicas, enquanto o administrador pode modificar quaisquer parâmetros. Digite a senha antiga, insira uma nova e confirme, você pode alterar a senha.
7.6.3 Backup/Restauração
Clique no item Backup/Restaurar para acessar a página de configurações do sistema, conforme mostrado abaixo:
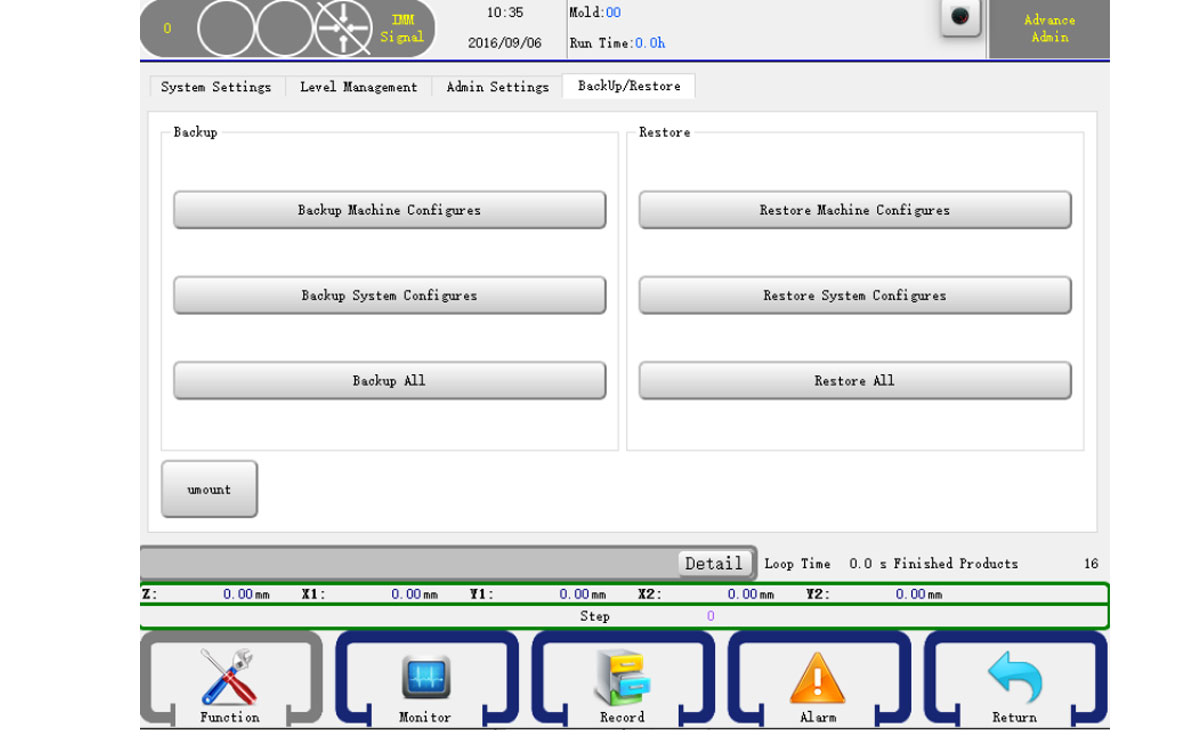
Você pode usar USB para fazer backup ou restaurar "Parâmetros da máquina", "Parâmetros do sistema" e "Parâmetros do molde" ou selecionar todos para fazer backup/restaurar.
7.7 Configurações de estrutura
Clique no item Configurações da estrutura para acessar a página de configurações da estrutura, conforme mostrado abaixo:
Comprimento Mecânico:O comprimento mecânico do eixo.
Distância/Rotação:A distância de uma rotação do servo.
Você também pode definir outros parâmetros, como 5.4. Pressione o botão Salvar para confirmar a alteração. AVISO:A definição da estrutura pode causar danos à máquina e ferimentos pessoais! Entre em contato com o fabricante.
7.8 Mantém
Clique no item Manutenção para acessar a página de manutenção, conforme mostrado abaixo:
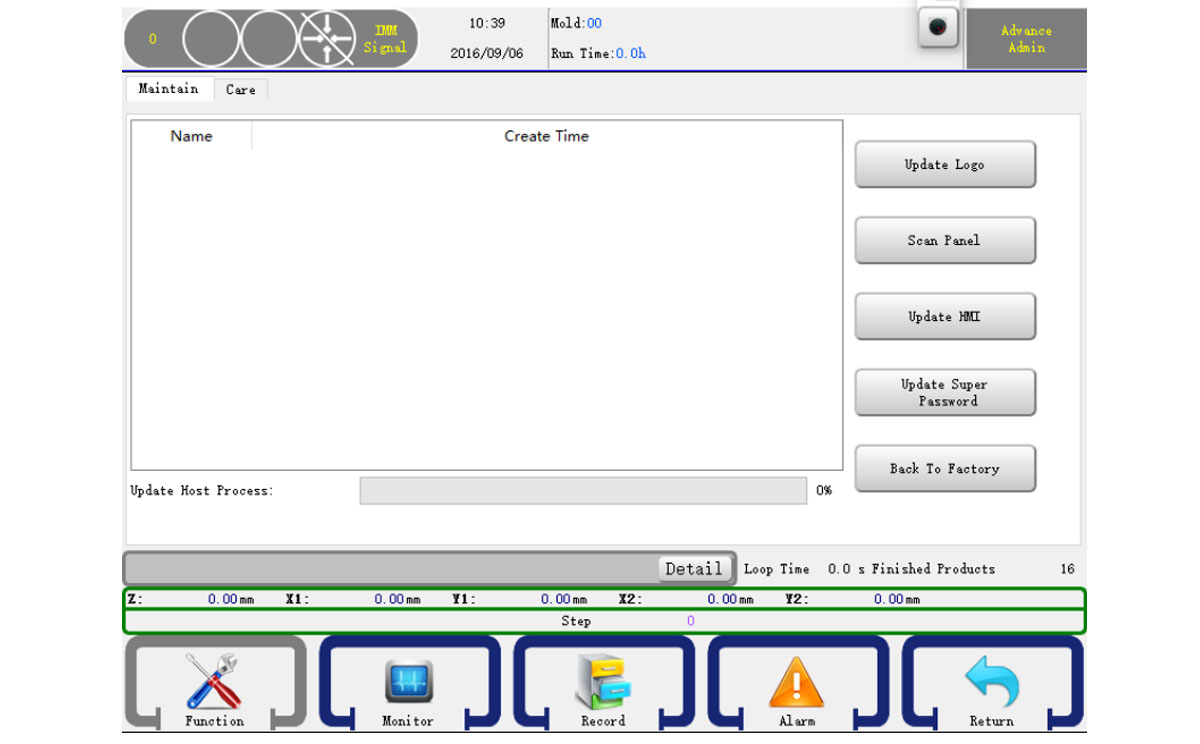
Você pode atualizar o sistema do painel de controle por USB. Insira o pacote de atualização do sistema em um pendrive. Clique no botão Atualizar e aguarde um pouco. A página mostrará a versão do sistema, caso seja possível verificar o pacote de atualização do sistema no pendrive. Caso contrário, basta pressionar o botão Atualizar novamente ou usar outro pendrive. Se o pacote de atualização do sistema for verificado, clique no botão Atualizar para iniciar a atualização do sistema. Após a conclusão, uma mensagem será exibida e o sistema será reiniciado. Você poderá então desconectar o pendrive.







