
Instruções de instalação de braços robóticos SWITEK para máquinas de moldagem por injeção - Capítulo 6: Gerenciamento de registros
Resumo
O braço robótico servo SWITEK de 3/5 eixos é capaz de gravar mais de 100 programas para diferentes projetos de moldes. Neste capítulo, mostraremos como criar um novo programa, fazer backup de um programa existente e recarregá-lo a partir de um pendrive e como o braço robótico reagirá ao programa, etc.
6.1 Create and Load Program
On the stop status and then click the record button on the menu bar to go into the record management page. You can maintain your programs in this page. As shown below:
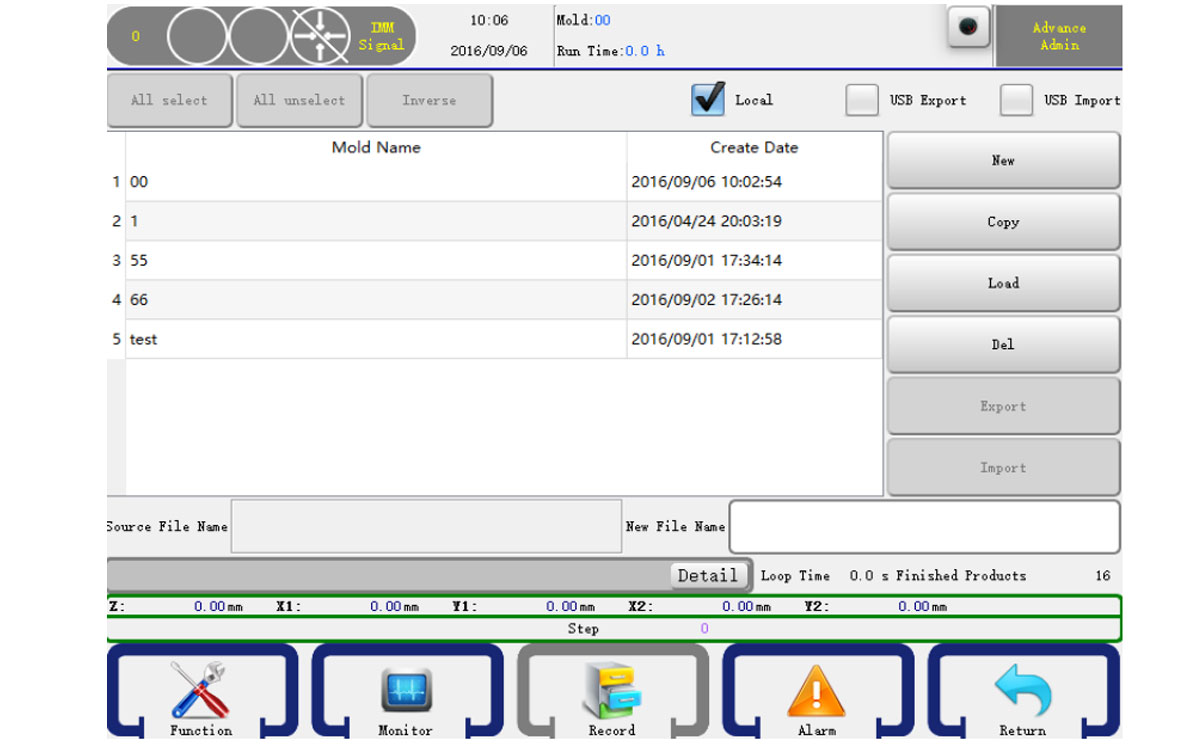
- Criar programa: Insira um nome de programa na caixa de nome de arquivo e clique no botão novo para criar um novo programa.
- Copiar Programa: Insira um nome de programa na caixa de nome de arquivo e clique no botão copiar para copiar um programa para um novo programa.
- Carregar programa: Selecione um programa e clique no botão carregar para carregar um programa.
- Excluir Programa: Selecione um programa e clique no botão Excluir para excluí-lo. O programa em uso no momento não pode ser excluído.
- Exportar programa: Selecione um programa e clique no botão exportar para fazer backup do programa em uma chave USB.
6.2 Instrução do programa
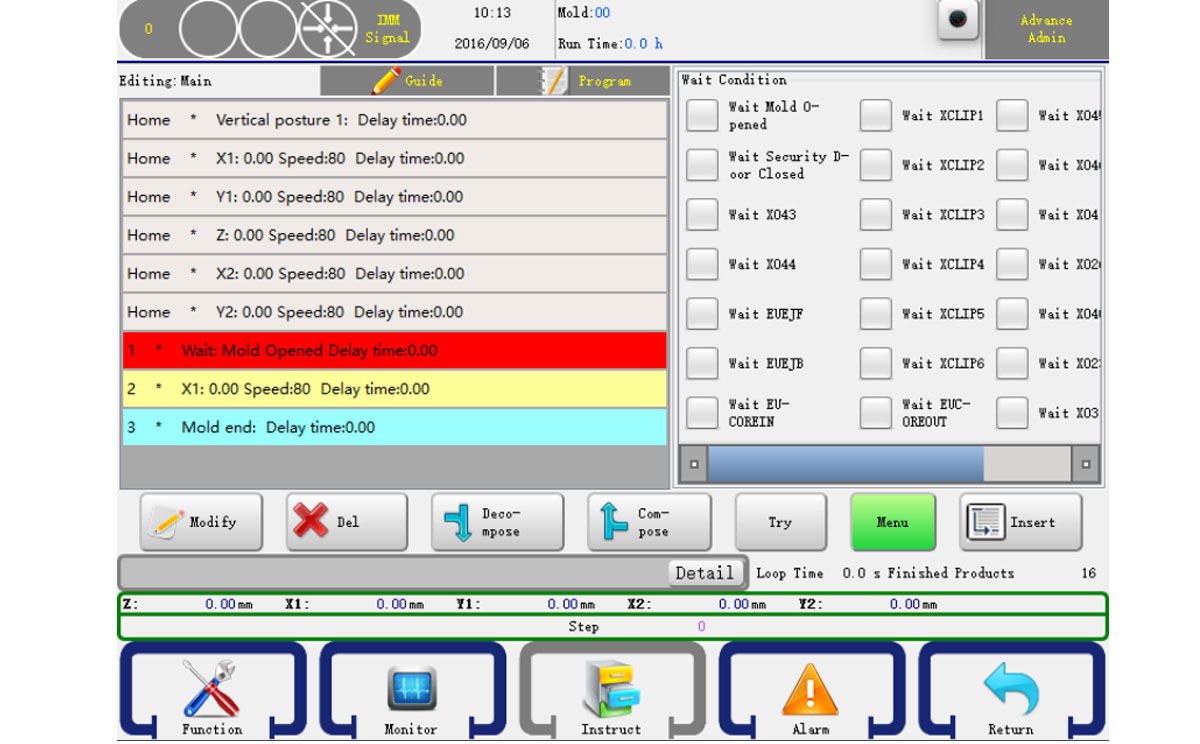
Gire o botão para a esquerda para entrar no modo manual e, em seguida, clique no botão de ensino na barra de menu principal para abrir o editor de programas. Conforme mostrado abaixo:
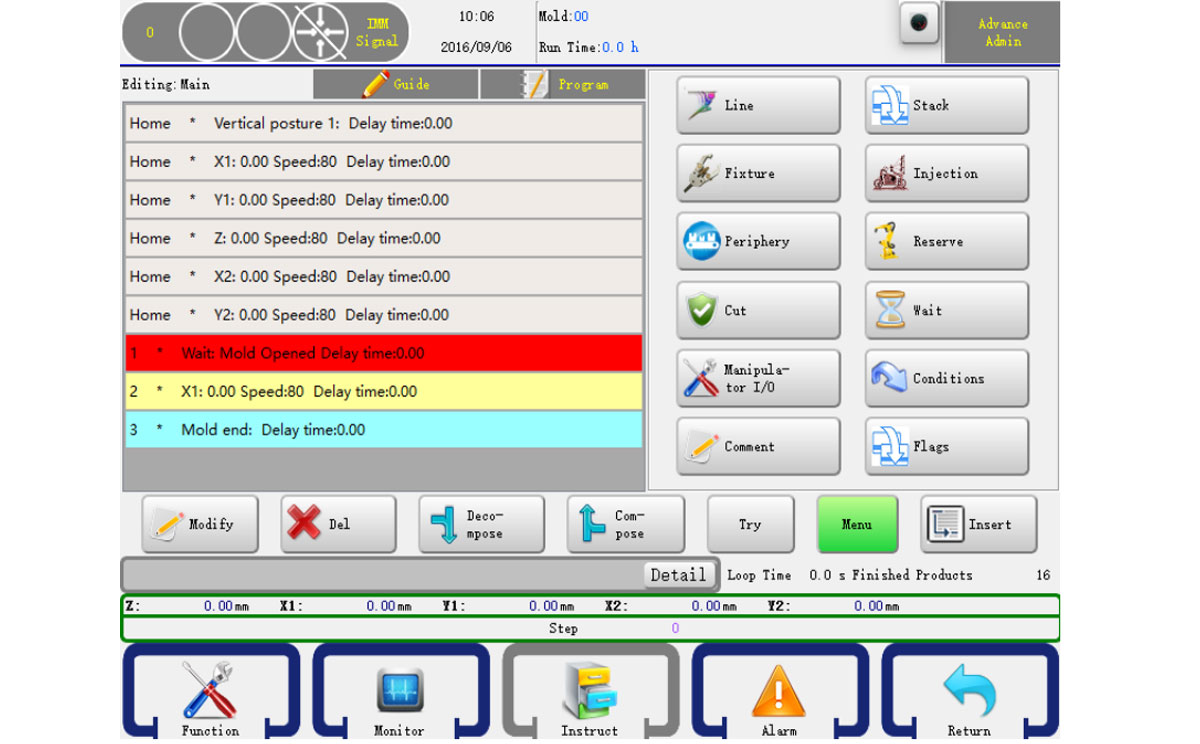
Ação Servo, Ação Stack, Ação Fixture, Injeção, Ação Auxiliar, Ação Reserva, Ação Check, Ação Wait, Ação Series e Periferia estão incluídas no botão "Instruct". Clique nestes botões para editar um programa. Pressione "Instruct" para retornar ao menu.
No modo de instrução, após selecionar as ações que deseja combinar, clique em "Combinação" e você obterá a mesma etapa de ação, que funciona simultaneamente à operação automática. Você também pode separar uma etapa combinada em várias etapas pressionando o botão "Quebrar".
6.2.1 Ação Servo
Clique no botão Linha para acessar o editor de ação do servo. Você pode definir o status dos eixos X1(X2), Y1(Y2), Z e C(Postura), conforme mostrado abaixo:
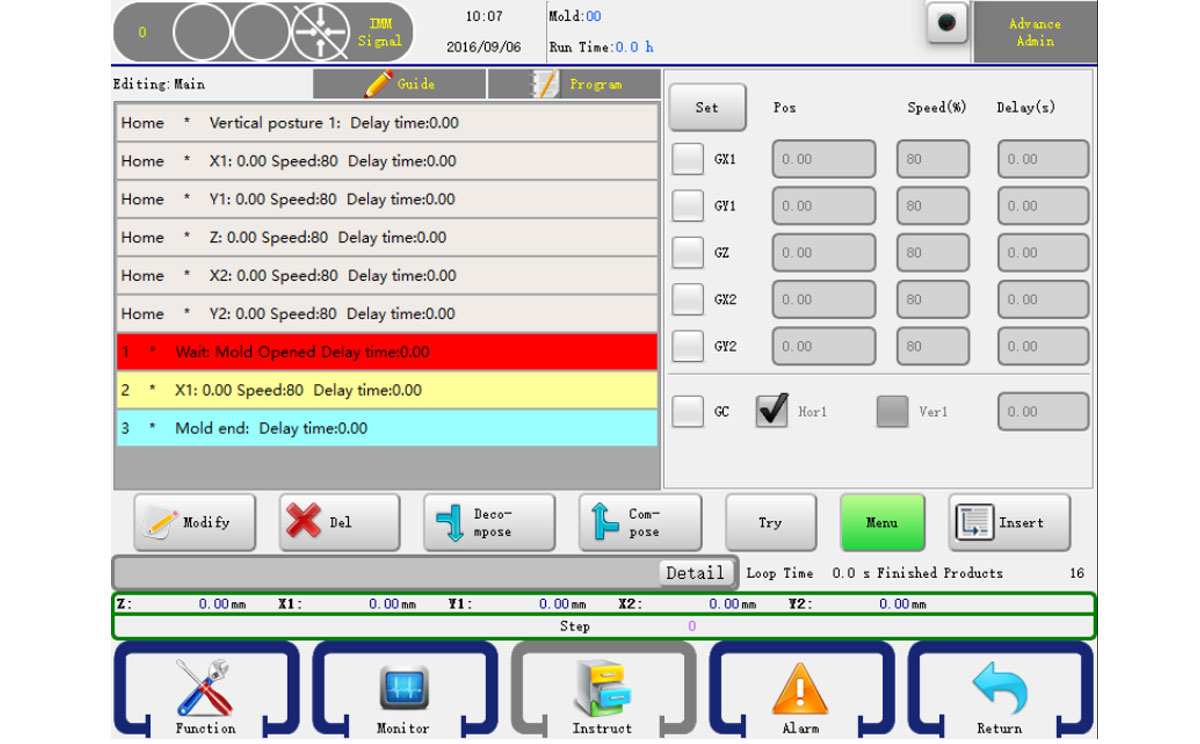
Nesta página, você pode definir X1(X2), Y1(Y2), a posição do eixo Z, a velocidade de operação e o tempo de atraso. Após clicar no ícone √ à esquerda, configure os parâmetros dos eixos, selecione e clique no botão "Inserir" para que as configurações correspondentes sejam confirmadas e inseridas nas etapas do programa.
Há duas maneiras de definir a posição do eixo:
- Insira a posição desejada na caixa do editor.
- Pressione o botão do eixo no teclado para mover o braço para a posição desejada e, em seguida, clique no botão definir.
6.2.2 Ponto de partida do programa
As seis etapas são mostradas como posição de origem e pose dos seis eixos
Os seis passos do status [Início] acima, que são os passos padrão em um novo programa, podem ser editados clicando em "Editar" para modificar a posição inicial, a velocidade de operação e o tempo de atraso dos eixos, sem serem excluídos.
6.2.3 Ação de pilha
Clique no botão Stack para acessar o editor de ações stact, conforme mostrado abaixo:
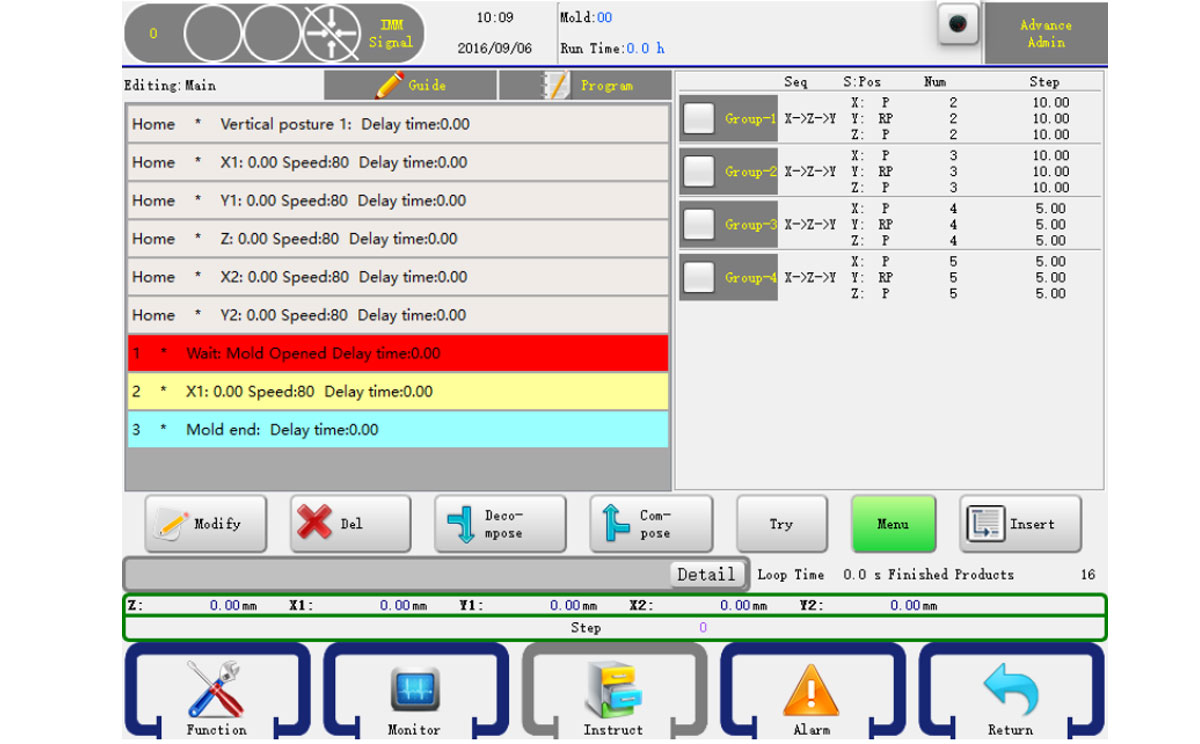
Selecione o lado esquerdo da pilha para inserir o grupo de programas, defina o grupo e clique no botão Inserir na frente da etapa de empilhamento. O robô empilhará os produtos conforme a ordem durante a operação automática.
Se você quiser usar o eixo Y para empilhar, certifique-se de que a pilha esteja inserida antes da operação de abaixamento do eixo Y.
6.2.4 Ação do dispositivo
Clique no botão Fixture para acessar o editor de ação de fixação e ventosa, conforme mostrado abaixo:
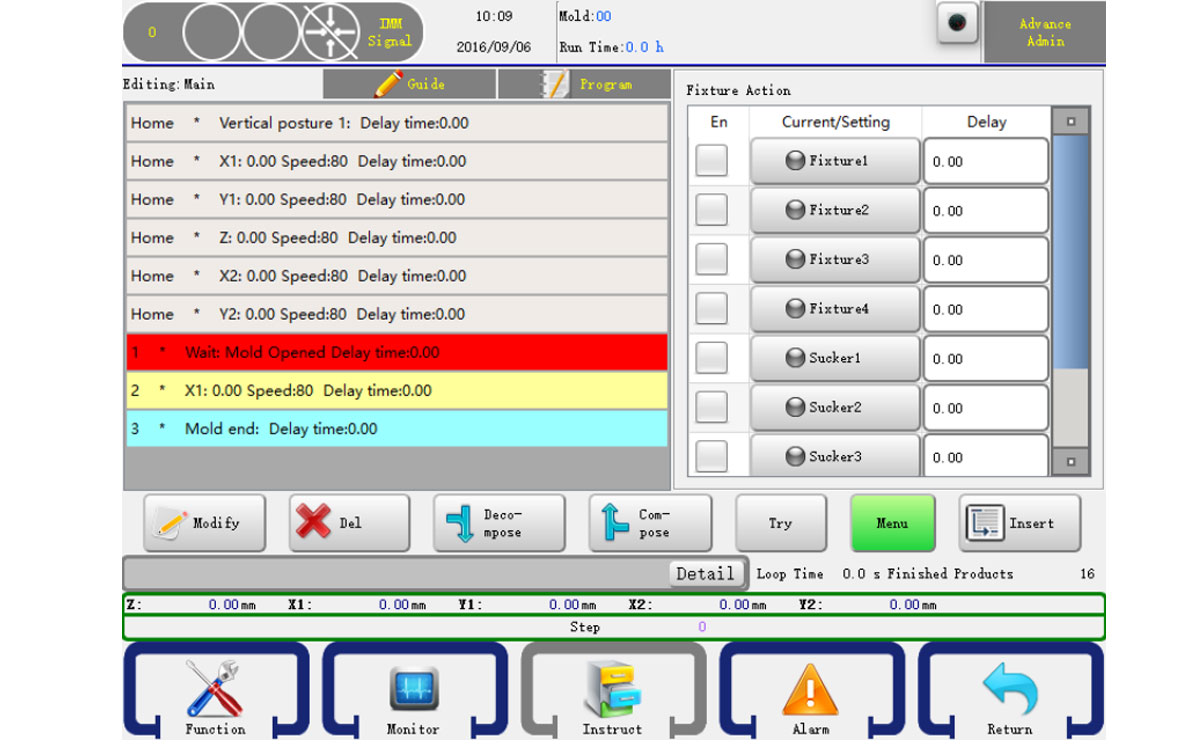
O controlador pode definir quatro dispositivos de fixação e duas ações de ventosa, clicando no botão a ser controlado e o indicador fica vermelho quando emitido. Em seguida, clique à esquerda para que se torne &radical; clicando em "Inserir", a etapa de ação é inserida nas etapas iniciais do procedimento de seleção.
Após inserir a ação de fixação e sucção, certifique-se de inserir a ação de Verificação, ou o programa não testará o sinal de conformação. Se você não reconhecer o sinal, não precisará da ação de Verificação. Mas, de qualquer forma, é melhor ter a ação de Verificação para proteger a máquina.
6.2.5 Ação IMM
Clique no botão Injeção para acessar o editor de ação de injeção, conforme mostrado abaixo:
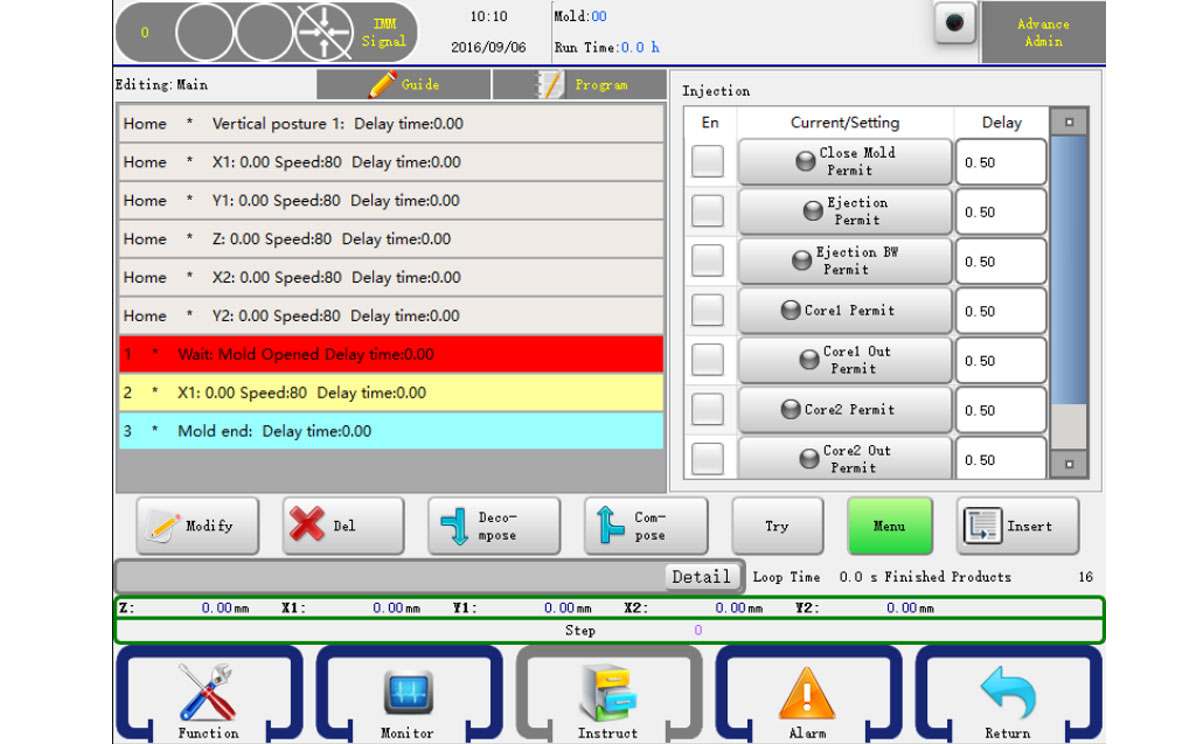
A operação é a mesma da ação de fixação do programa. Consulte 6.2.4.
6.2.6 Ação Auxiliar
Clique no botão Auxiliar para acessar o editor de ações periféricas. Você pode encontrar as ações de injetor, transportador, ponto de reserva e pilha neste editor, conforme mostrado abaixo:
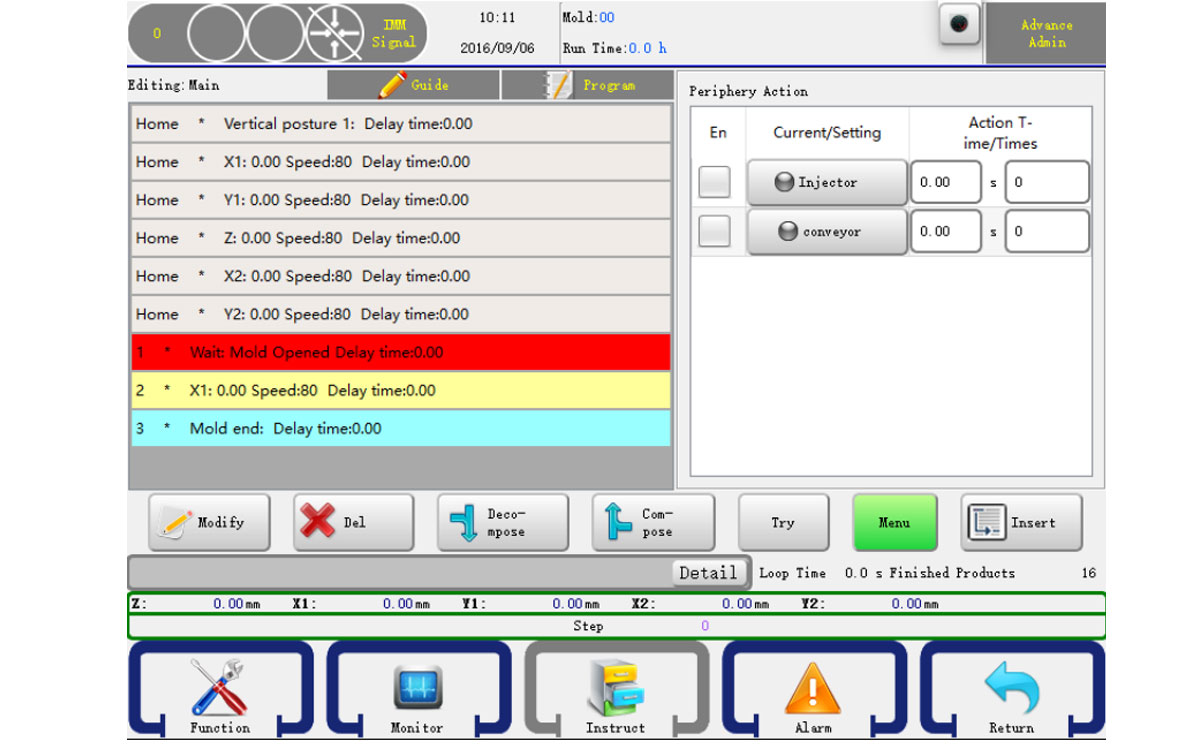
A operação é a mesma da ação de fixação do programa. Consulte 6.2.4. Tempos: Indica quanto tempo a ação deve ser executada em um ciclo.
Atraso: Define quantos moldes serão executados em Automático quando a saída for feita, talvez a cada 1 ou 2, etc.
6.2.7 Ação de Reserva
Clique no botão Reservar para acessar o editor de ações. Conforme mostrado abaixo:
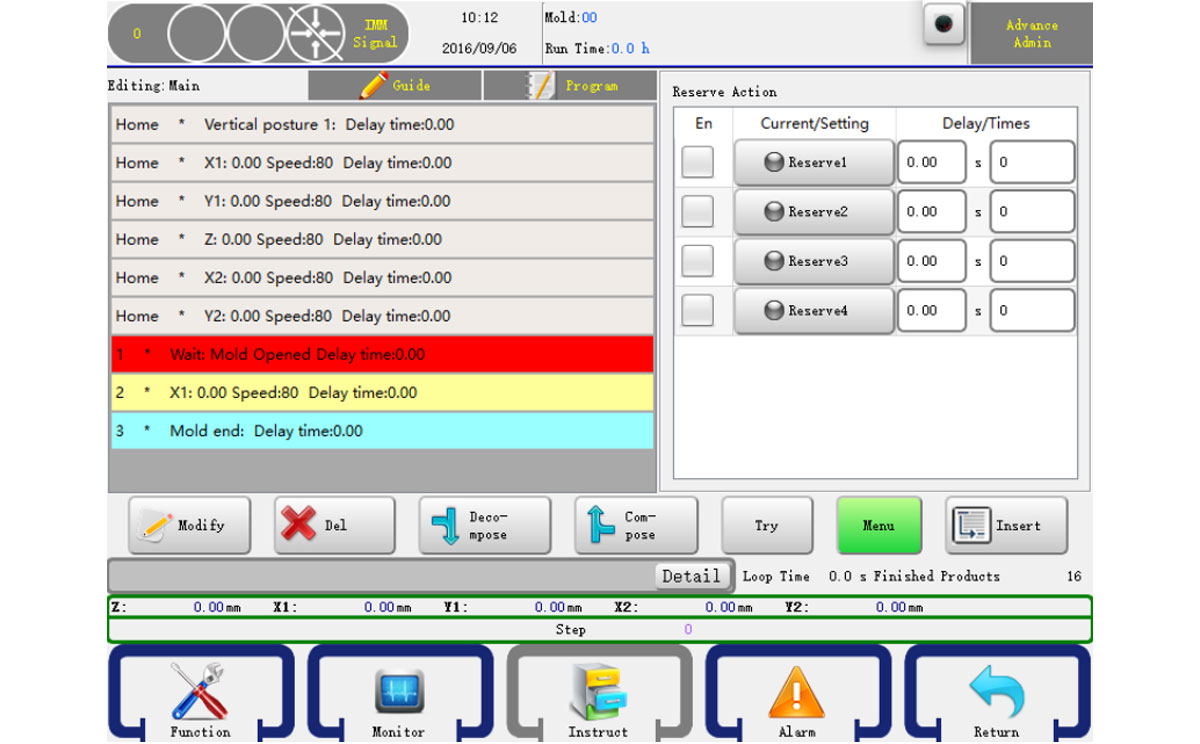
Há quatro reservas no sistema.
Tempos:Significa quanto tempo a ação deve ser executada em um ciclo.
Atraso:Define quantos moldes serão gerados em Automático, talvez a cada 1 ou 2, etc.
6.2.8 Ação de espera
Clique no botão "esperar" para acessar o editor de ações de espera. Este tipo de ação significa que o programa será interrompido antes do sinal de entrada que você deseja aguardar. O editor é mostrado abaixo:
Basta marcar o sinal que você deseja esperar e clicar no botão inserir para confirmar sua alteração.
6.2.9 Comentário
Clique no botão Comentar para acessar o Editor de Comentários, onde você pode fazer comentários sobre o programa.

Você pode usar o teclado virtual para inserir as informações.

6.2.10 Condições
Você também pode definir condições no seu programa:
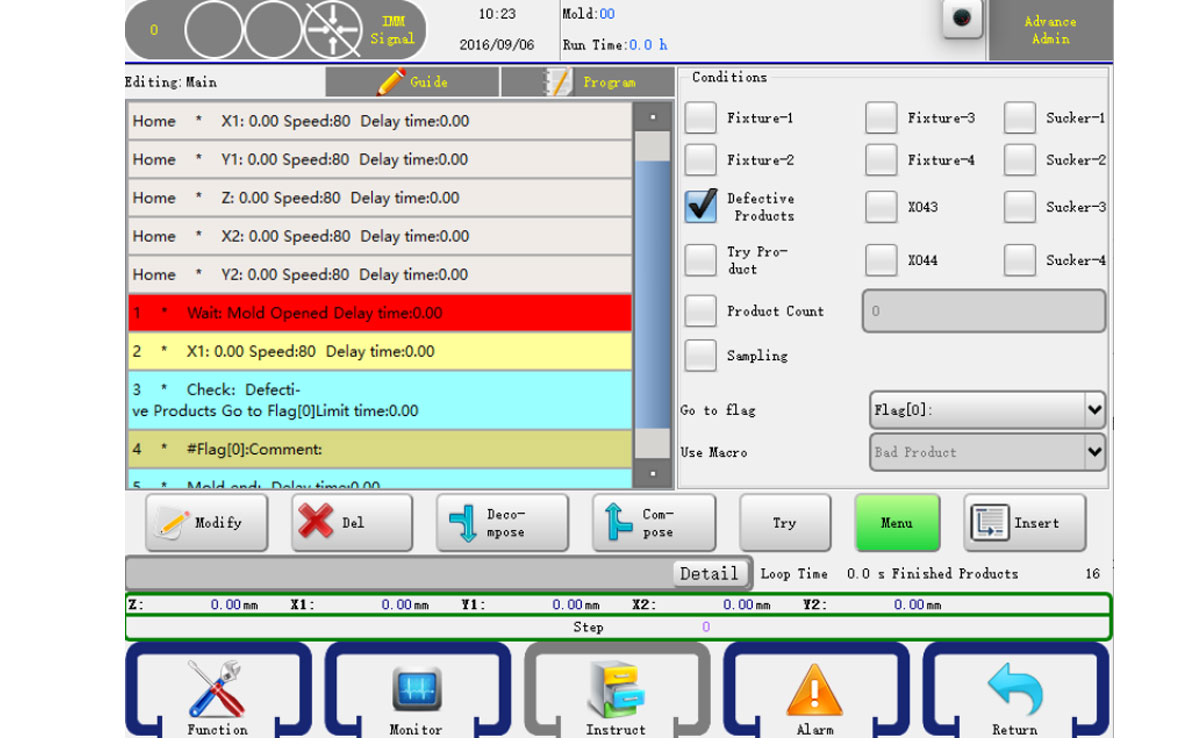
Atenção: O programa deve ter um Comentário para usar as condições.
6.2.11 Modificar Programa
Selecione a etapa que deseja modificar e clique no botão modificar. Isso abrirá a caixa de diálogo de modificação, conforme mostrado abaixo:
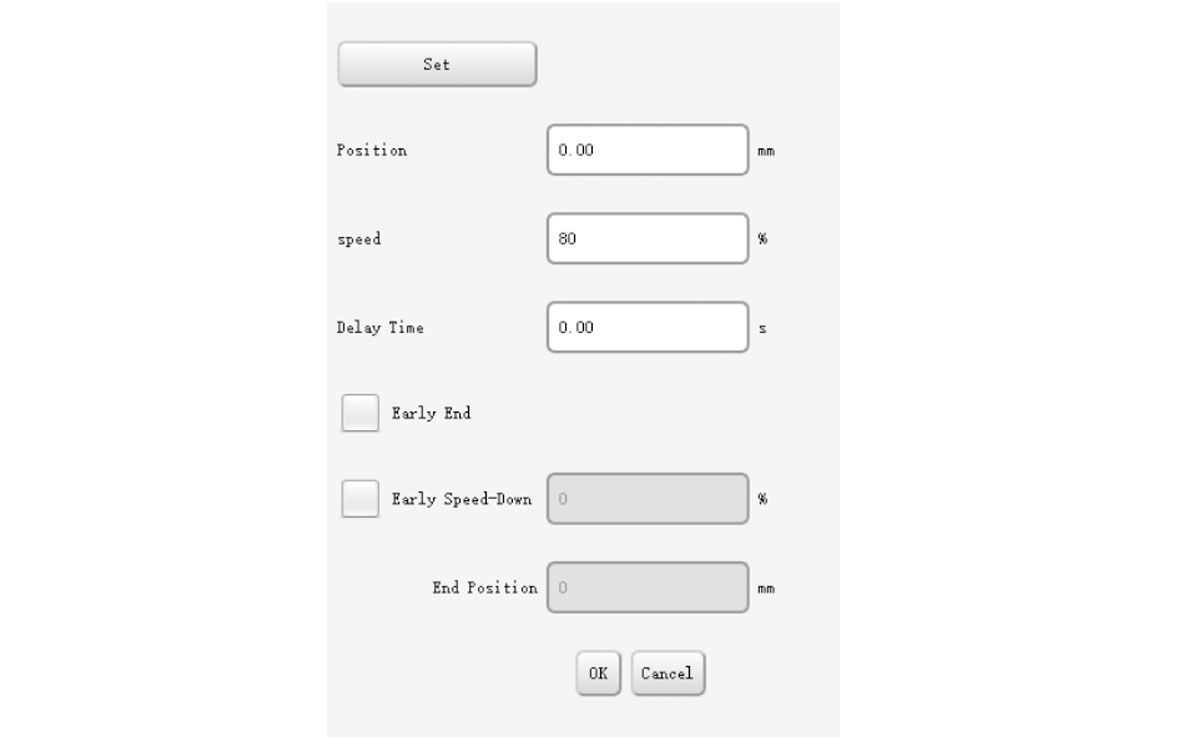
Você pode modificar a configuração da ação e pressionar OK para confirmar.
6.3 Demonstração
O procedimento a seguir ajudará você a aprender e praticar a programação de robôs. No programa real do robô de moldagem, dependendo da sua situação real, defina a posição do eixo servo e a sequência correta com a máquina de moldagem por injeção.
6.3.1 Comando
O procedimento usado para coletar os produtos e alimentar a cauda é o seguinte: o robô permanece na parte superior da máquina de moldagem por injeção e aguarda o sinal de abertura do molde. Quando o molde da máquina de moldagem por injeção é aberto, os braços descem e coletam os produtos e o canal, que então desce para o triturador, depositando o produto na esteira transportadora, que se move a cada ciclo do molde.
6.3.2 Ações
> Muda para o modo automático.
> Os braços correm para o ponto inicial aguardando o sinal de abertura do molde.
> Sucção 1 para o produto, dispositivo 1 para o canal.
> Os braços saem da máquina de moldagem por injeção e ativam o sinal de fechamento do molde.
> Solta o canal.
> Coloca o produto na esteira e começa a se mover por 3 segundos.
> Os braços retornam à posição de espera.
6.3.3 Programa
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
- Wait: Mold Opened Delay time: 0.00
- Y1: 850.0 Speed: 90 Delay time: 0.00
- X1: 400.0 Speed: 90 Delay time: 0.00
- Y2: 850.0 Speed: 90 Delay time: 0.00
- X2: 400.0 Speed: 90 Delay time: 0.00
- Sucker1 On Delay time: 0.00
- X1: 0.0 Speed: 90 Delay time: 0.35
- Y1: 0.0 Speed: 90 Delay time: 0.00
- X2: 0.0 Speed: 90 Delay time: 0.35
- Y2: 0.0 Speed: 90 Delay time: 0.00
- Sucker1 Begin-cut
- Lock Mold On Delay time: 0.00
- Horizontal posture Delay time: 0.00
- Z: 1000.0 Speed: 90 Delay time:0.00
- Y1: 800.0 Speed: 90 Delay time: 0.00
- Y2: 800.0 Speed: 90 Delay time: 0.00
- Sucker1 OFF Delay time:0.00
- Y1: 0.0 Speed: 90 Delay time: 0.25
- Y2: 0.0 Speed: 90 Delay time:0.25
- Conveyor On Times: 1 Action time: 3.00
- Z: 0.0 Speed: 90 Delay time: 0.00
- Vertical posture Delay time: 0.00
- Mold End Delay time:0.00







