
Instruções de instalação de braços robóticos SWITEK para máquinas de moldagem por injeção - Capítulo 5: Operação
Resumo
Manual, parada e automático são os três estados operacionais dos braços robóticos para máquinas de moldagem por injeção, que o operador pode escolher através do interruptor no canto superior esquerdo do controlador manual. Neste capítulo, discutiremos como operar e programar o braço robótico em testes, programação, parametrização e execução automaticamente.
5.1 Posição de origem retornada
Para que o robô possa funcionar corretamente automaticamente após ser ligado, é necessário retornar à posição original (ORI) fazer com que o robô retorne à posição inicial para cada eixo, sendo necessário o retorno da ventosa e do dispositivo de fixação para a posição fechada.
No modo de parada, pressione o botão "Home" uma vez e, em seguida, pressione o botão "Start" para retornar à posição inicial com cada eixo Y1(Y2), X1(X2), Z em ordem. Ao mesmo tempo, uma caixa de diálogo aparecerá para lembrá-lo de que você está em andamento operação OPR e todos retornarão à sua origem, com a posição de cada eixo elétrico sendo 0.
Quando todos os eixos, ventosas e fixadores retornarem à posição inicial, haverá um ícone no canto superior direito da tela  , você poderá operar nos modos automático e manual.
, você poderá operar nos modos automático e manual.
Não é possível operar manualmente, automaticamente e modificar as configurações quando o OPR estiver ativado. Pressione o botão de parada ou o botão de parada de emergência em caso de emergência para interromper o OPR.
5.2 Operação manual
Gire o botão para a esquerda e o robô entrará em Status Manual. Conforme mostrado abaixo:
5.2.1 Ação do eixo
Os usuários não podem mover os braços antes da origem definida, mas podem operar válvulas pneumáticas.
 | Controle pneumático: Braço principal para cima com uma pressão Controle elétrico: Braço principal levantado quando pressionado. O movimento para ao ser liberado. |
 | Controle pneumático: Braço principal abaixado e pressionado uma vez. Electric control: Main arm down with pressed. The moving stopped when pressing released.Controle elétrico: Braço principal abaixado com a tecla pressionada. O movimento para ao ser pressionado e liberado. |
 | Controle pneumático: Braço de apoio para cima e pressionado uma vez. Controle elétrico: Braço de apoio pressionado. O movimento para quando pressionado e liberado. |
 | Controle pneumático: Braço de apoio para baixo e pressionado uma vez. Controle elétrico: Braço de apoio para baixo com a mão pressionada. O movimento para quando pressionado e liberado. |
 | Controle pneumático: Braço principal para trás com uma pressão. Controle elétrico: Braço principal para trás quando pressionado. O movimento para quando pressionado e liberado. |
 | Controle pneumático: Braço principal para frente com uma pressão. Controle elétrico: Braço principal para frente com pressionado. O movimento para quando pressionado e liberado. |
 | Controle pneumático: Subbraço para trás com uma pressão. Controle elétrico: Subbraço para trás quando pressionado. O movimento para quando pressionado e liberado. |
 | Controle pneumático: Subbraço para frente pressionado uma vez. Controle elétrico: Subbraço para frente quando pressionado. O movimento para quando pressionado e liberado. |
 | Controle pneumático:A postura é alterada para a posição vertical com uma única pressão. Controle elétrico:A postura se move em direção à posição vertical quando pressionada. O movimento para quando a pressão é liberada. |
 | Controle pneumático:A postura do braço robótico gira para a posição horizontal quando pressionado uma vez. Controle elétrico:A postura do braço robótico girava para a posição horizontal quando pressionado. O movimento parava quando o pressionamento era liberado. |
 | Atravessar para dentro |
 | Atravessar para fora |
5.2.2 Ação do dispositivo
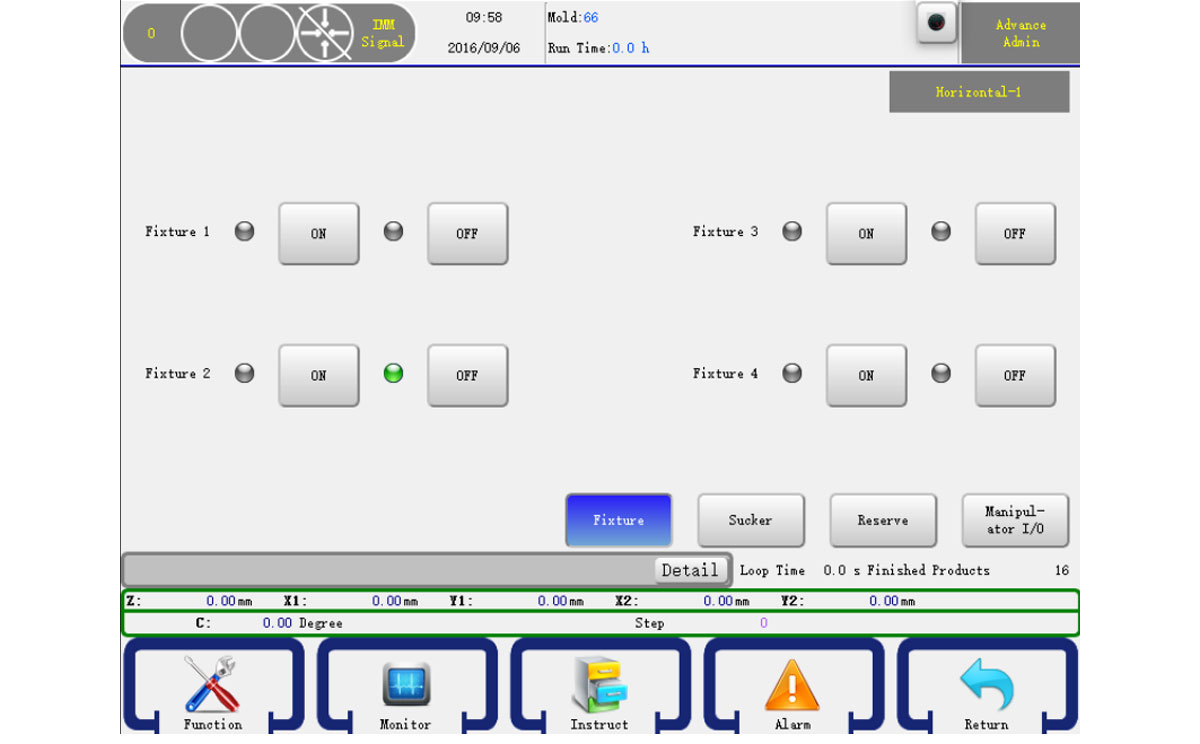
Na página do manual, clique no botão Fixture no canto inferior direito para acessar a página do manual, conforme mostrado abaixo:
Existem quatro luminárias. Pressione o botão ON para ligá-las e o botão OFF para desligá-las. Atenção: O sinal de entrada é exibido em vermelho e o sinal de saída em verde. O indicador de entrada ou saída fica desligado se não houver sinal.
5.2.3 Ação de sucção
Na página do manual, clique no botão de sucção [Sucker] no canto inferior direito para acessar a página do manual de sucção, conforme mostrado abaixo:
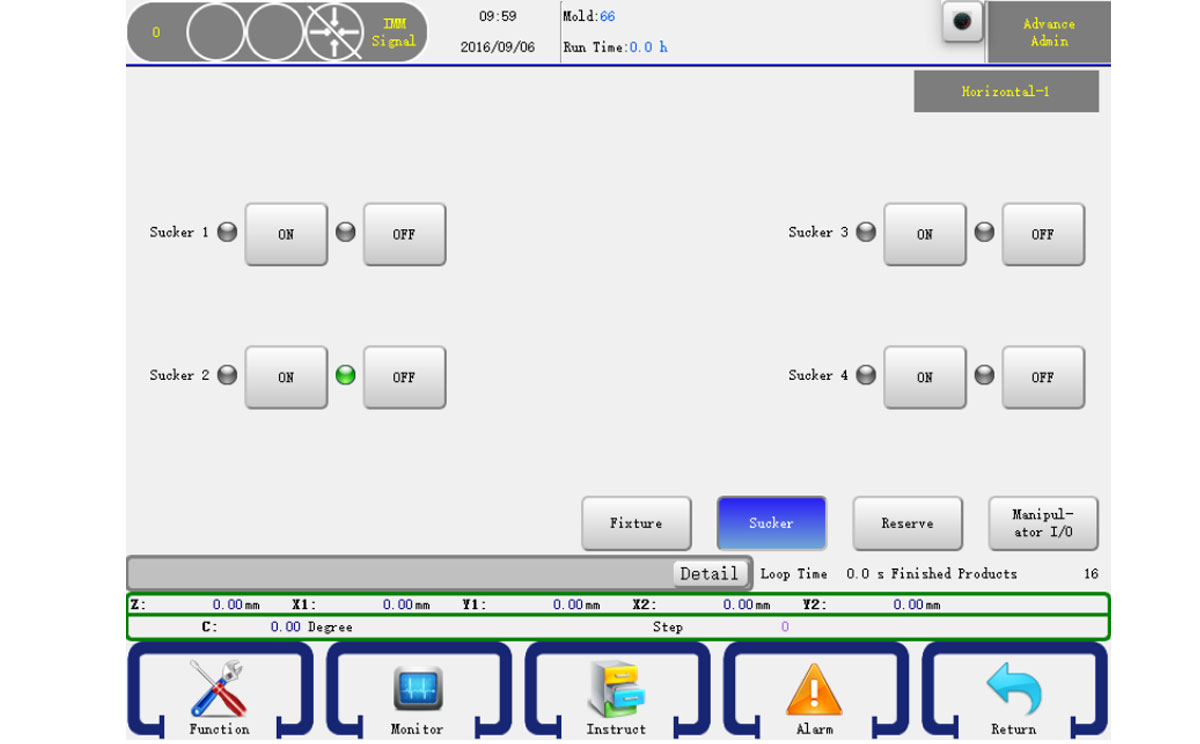
Há quatro ventosas. Pressione o botão ON para ligá-las e o botão OFF para desligá-las.
Atenção: O sinal de entrada é vermelho e o sinal de saída é verde. O indicador de entrada ou saída fica desligado se não houver sinal.
5.2.4 Ação Auxiliar
Na página do manual, clique no botão Outro no canto inferior direito para acessar a outra página do manual, conforme mostrado abaixo:
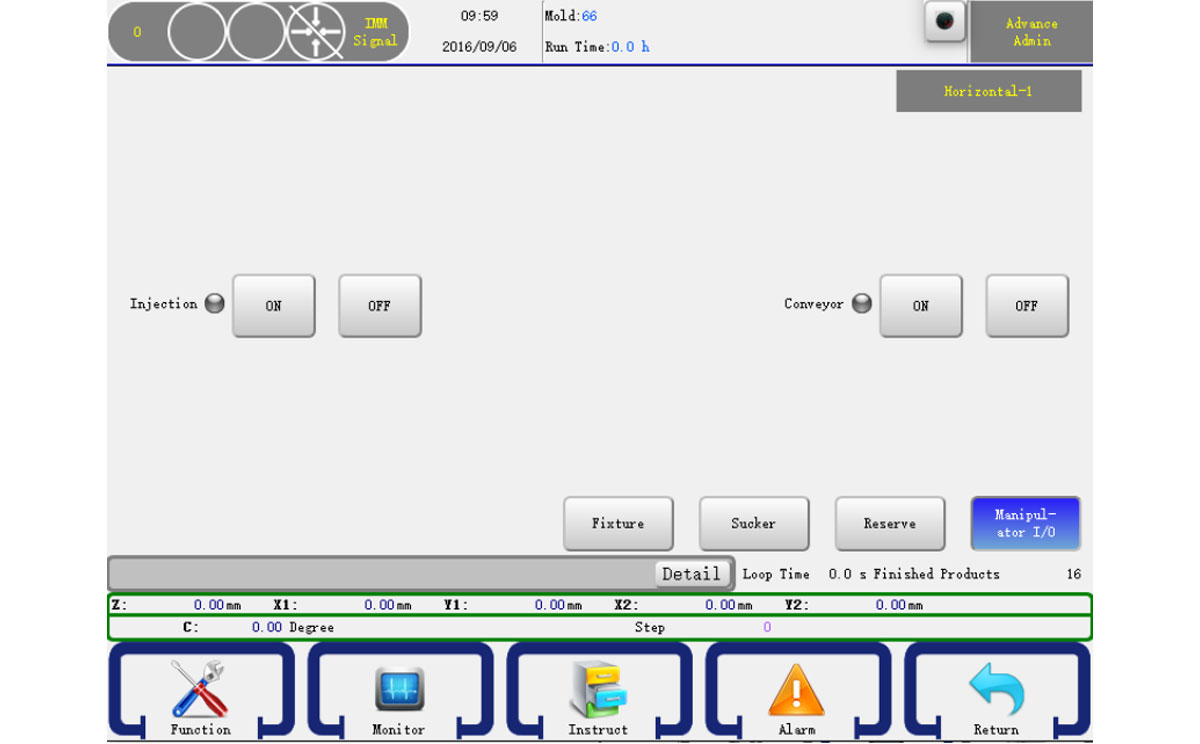
A operação é a mesma que Fixture
5.2.5 Ação de Reserva
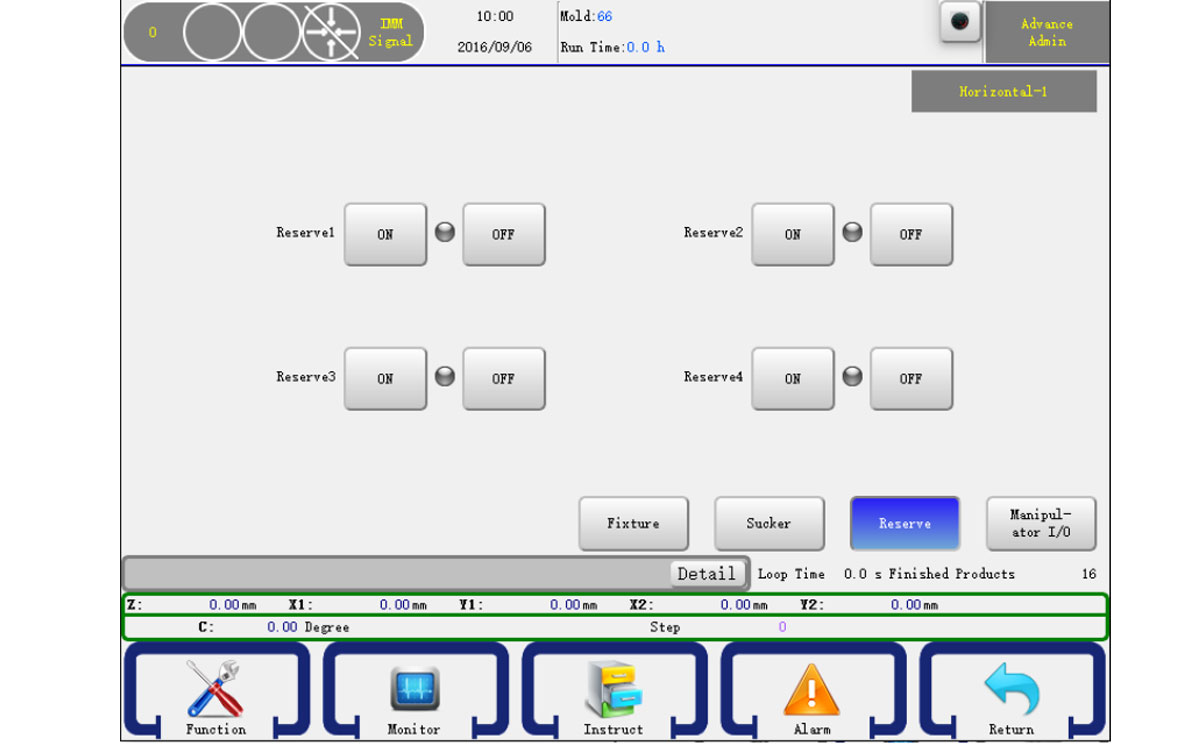
A operação é a mesma do Fixture
5.3 Modo Automático
5.3.1 Monitorar o status de execução automática
Gire o botão para a direita para acessar a página de execução automática. O robô mudará para o Status de Pronto Automático. Neste status, pressionar o botão Iniciar fará com que o robô mude para o Status de Execução Automática. Você pode monitorar o status de execução, conforme mostrado abaixo.
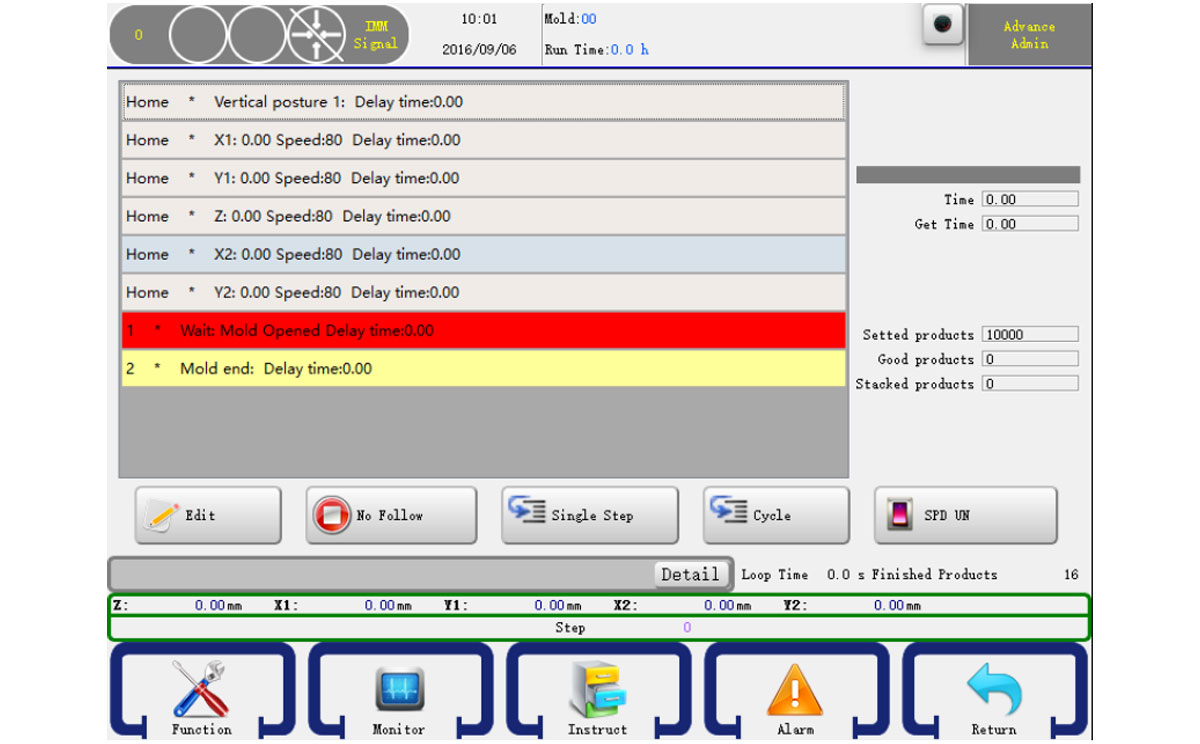
- Período: Suspensão de tempo no ciclo de execução automática.
- Tempo de Extração: O tempo que o robô levou para pegar e retirar o produto do Auto.
- Produtos Configurados: Quantidade de produtos por conjunto. O alarme dispara quando o contador de produtos é atingido.
- Qualificado: O número de peças retiradas pelo braço robótico.
- Número de empilhamento: O número de produtos que foram empilhados pelo robô.
- Tempo de Loop: O tempo após um ciclo de execução no Auto.
- Contagem finalizada: O número de produtos finalizados.
5.3.2 Ajustar configurações em execução
No status de execução automática, você pode modificar a ação das configurações do programa. Basta selecionar uma etapa e clicar no botão de edição, que exibirá uma caixa de diálogo do editor. Após clicar em "OK", os dados serão aceitos e, no próximo ciclo, será executado de acordo com sua configuração. Se você pressionar "Cancelar", a operação será cancelada.
Para garantir que essas configurações não causem danos ao robô, à máquina ou ao molde, é permitida uma distância de 5 mm. Conforme mostrado abaixo:
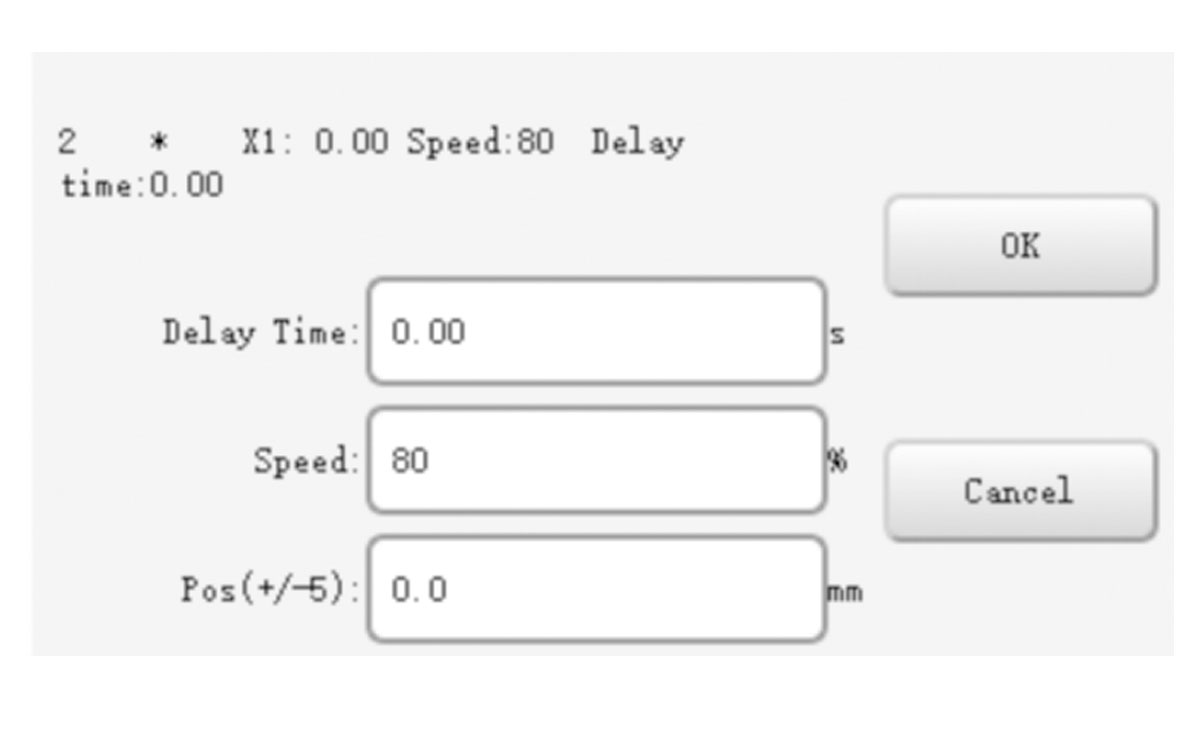
Após terminar, basta clicar no botão OK para confirmar sua alteração.
5.3.3 Corrida em um único passo
No status de execução automática, você pode clicar em um único botão para executar uma etapa. Clicar novamente executará a próxima etapa, e assim por diante. Este recurso é muito útil ao depurar seu programa.
5.3.4 Ajuste de velocidade
Clique em "Botão de velocidade" para que ele se torne "Exibição de velocidade" e ajuste a velocidade geral pressionando "Ajuste de velocidade" no teclado e no painel no canto inferior esquerdo.







